Setting the Deadband (PID)
The adjustable deadband lets you select an error range above and below the setpoint where output does not change as long as the error remains within this range. This deadband allows you to control how closely the process variable matches the setpoint without changing the output. The deadband also helps to minimize wear and tear on your final control device.
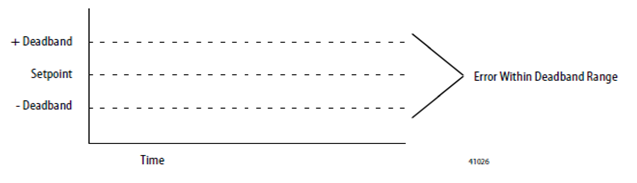
Zero-crossing is deadband control that lets the instruction use the error for computational purposes as the process variable crosses into the deadband until the process variable crosses the setpoint. Once the process variable crosses the setpoint (error crosses zero and changes sign) and as long as the process variable remains in the deadband, the output does not change.
The deadband extends above and below the setpoint by the value you specify. Enter zero to inhibit the deadband. The deadband has the same scaled units as the setpoint. Use the deadband without the zero-crossing feature by selecting
No zero crossing for deadband
on the Configuration
tab or set the .NOZC bit in the PID structure.If you are using the deadband, the Control variable must be REAL or it is forced to zero when the error is within the deadband.
To inhibit the deadband:
- Enter zero (0).
The deadband has the same scaled units as the setpoint.
To use the deadband without the zero-crossing feature:
- SelectNo zero crossing for deadbandon theConfigurationtab or set the .NOZC bit in the PID structure.
If you are using the deadband, the Control variable must be REAL or it is forced to 0 when the error is within the deadband.
Provide Feedback