Downloads
On This Page:
What is this for?
The purpose of this document is to provide guidelines how to setup a load sharing application using a torque follower setup.
Load sharing is a term used to describe a system where multiple drives and motors are coupled and used to run one mechanical load.
The following assumptions are made:
- Drives and motors are properly sized for the application
- The drives are at factory default settings
- The motors are equipped with rugged feedback devices
- Drives are equipped with TLink option module and feedback cards
Need Help?
If you need help with an application or have feedback from the Innovation Center, please contact us.
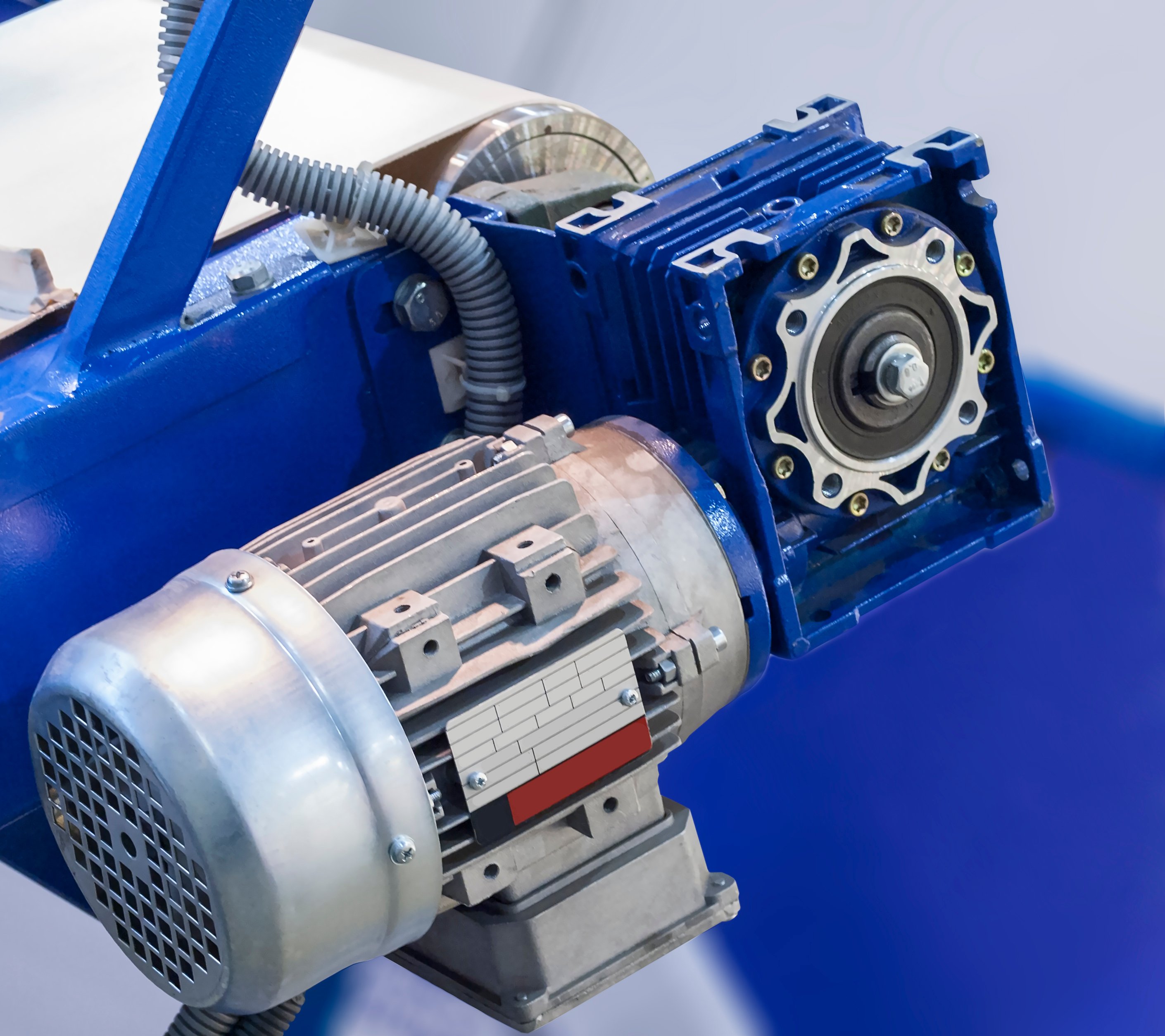
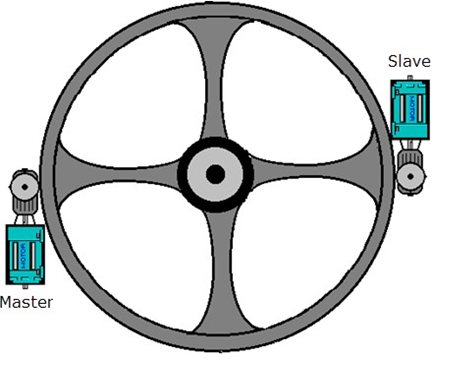
The example is based on a large diameter bull gear with two motors. The motors are coupled via tooth sprockets and gearboxes.
This creates a rigid connection between the motors, ideal for a torque follower setup.
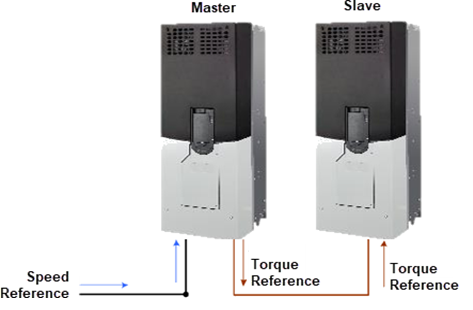
The torque follower (also known as master-slave) is a type of load sharing setup when we use one master drive in speed regulation and one follower drive in torque regulation.
The torque command generated by the master’s speed loop is transmitted to the follower drive to be used as torque reference.
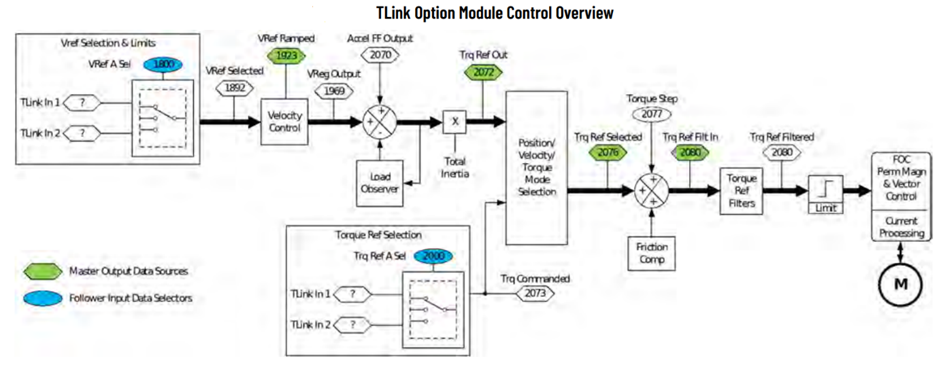
A torque follower setup makes two or more motors act as 1 big motor. See below torque follower block diagram.
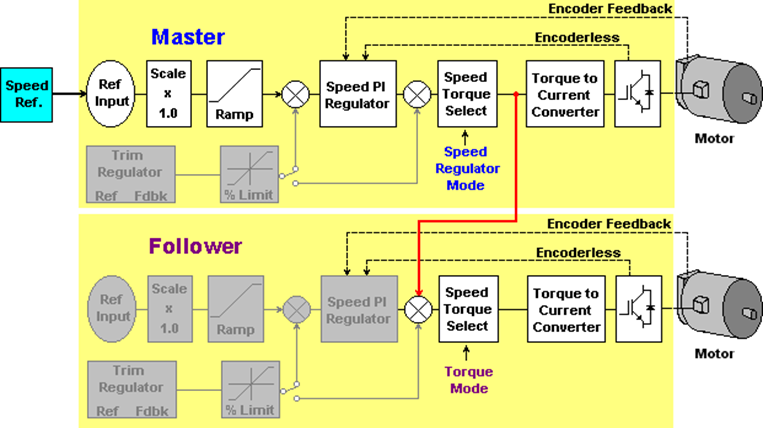
In this example the torque reference is transferred from the master drive to the follower drive via TLink option module.
Is this helpful?
If you are working with systems involving multiple motors coupled to a single load, this document will be very useful to you in setting up an efficient and effective control strategy.
How can I get this working?
- Hardware
- Logix 5580-1756-L8SE Control
- PowerFlex 755T Flux Vector Tuning
- TLink (FO Module) - 20-750-TLINK-FOC-5
- Incremental Encoder Board 20-750-ENC-1
- Software
- Studio5000 (V36)
- Previous knowledge:
- Basic knowledge of Studio5000
- Basic knowledge of PowerFlex 755T.
References documents
- PowerFlex Drives with TotalFORCE control Quick Start, Rockwell Automation Publication 750-QS100D-EN-P - January 2023.
- PowerFlex Drives with TotalFORCE control Programming Manual, Rockwell Automation Publication 750-RM100C-EN-P - August 2022.
- PowerFlex 755T Flux Vector Tuning Application Technique, Rockwell Automation Publication 750-AT006D-EN-P - January 2022.
- TLink Option Module User Manual Original Instructions, Rockwell Automation Publication 750COM-UM100A-EN-P - June 2021.
Installation Guide
Step 02
Tuning Steps
Tuning is critical working in Flux Vector control mode. We will use the Autotune function to measure motor characteristics. Autotune is composed of several individual tests, each of which is intended to identify one or more motor parameters. These tests require motor nameplate information to be entered into the drive parameters. We can run all the tests in the parameter 10:910 [Autotune].
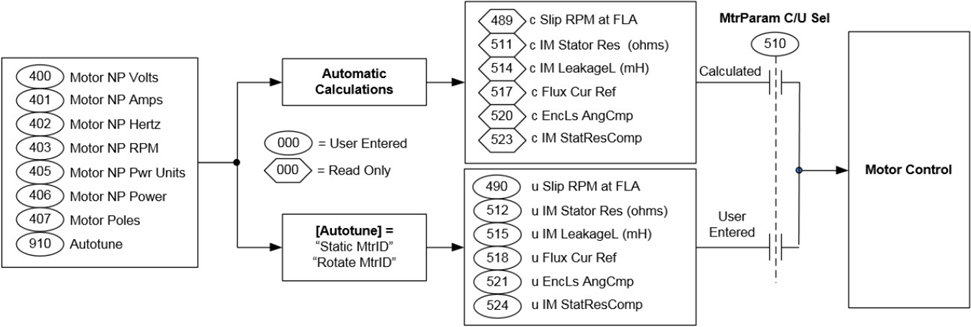
These are the recommended steps:1- Enter motor data parameters in 10:400 – 10:407.
2 - Run 10:910 [Autotune] = 1 “Direction”. This allows you to determine if the motor rotates in the desired direction. Also allows you to check if encoder feedback count increases in value for a forward velocity command.
3 - Measure the motor electrical parameters:
- Set 10:510[MtrParam C/U Sel] = 1 “User Entered”
- Run 10:910 [Autotune] = 3 “Rotate MtrID” to measure the motor electrical parameters. It initiates motion and rotates the load. To obtain the most accurate measure of motor flux current, disconnect the load for this test.
- If you cannot initiate motion to rotate the load, then run 10:910 [Autotune] = 2 “Static MtrID” to measure the motor electrical parameters.
4 - Set the current regulator bandwidth 10:445 [VCL CReg BW]
- 125 when 10:425 [PWM Frequency] = 1.33 kHz
- 250 when 10:425 [PWM Frequency] = 2 kHz
- 375 when 10:425 [PWM Frequency] = 4 kHz
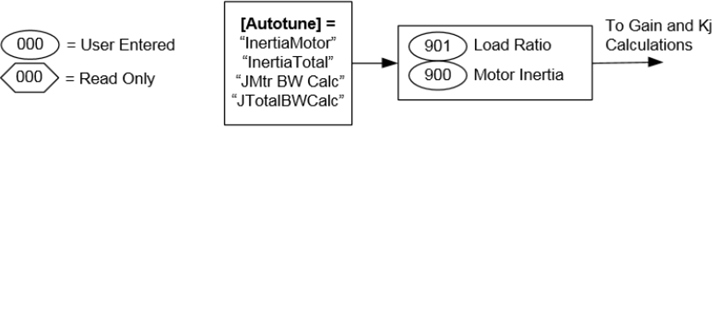
5 - Run 10:910 [Autotune] = 4 “InertiaMotor” to measure the motor inertia. This test initiates momentary motor rotation to measure and update 10:900 [Motor Inertia].
This test is only an option if the load can be disconnected to run the test. If the load cannot be disconnected, you should enter the value manually in 10:900 [Motor Inertia].
6 - In the master drive, run 10:910 [Autotune] = 5 “Inertia Total”. This test initiates momentary rotation of the motor and load to measure total inertia and calculate 10:901 [Load Ratio]. After selecting this value, you must issue a start command to begin the test. Perform this test with the load connected to the motor.
10:900 [Motor Inertia] and 10:901 [Load Ratio] are used to calculate the torque scaler Kj, an internal parameter that compensates for the effects of inertia and affects overall tuning. Load Ratio is also used to calculate controller gains.
Since the application will be controlled by 2 load sharing motors, the Load Ratio of the Master drive measured during the test can be divided by 2.
7 - In the master drive, run 10:910 [Autotune] = 6 “BW Calc”. The bandwidth calculation test calculates control loop gains and dynamic limits.
8 - Run the master drive and adjust system bandwidth in 10:906 [System BW] if necessary. Decreasing system bandwidth stabilizes the system and increasing it improves performance. Typically, high gain results in a quicker response time, but excessive gain causes system instability.
For more information about tuning see PowerFlex 755T Flux Vector Tuning, publication 750-AT006.
Step 04
Load Logix program into the controller Steps
1 - On the Studio 5000 development software we open the program “Torque_Follower_with_TLink”, the following image is then displayed, where the controller, an analog and a digital card, as well as the Ethernet card where the PowerFlex 755TS Drives will be part of the network are already added.
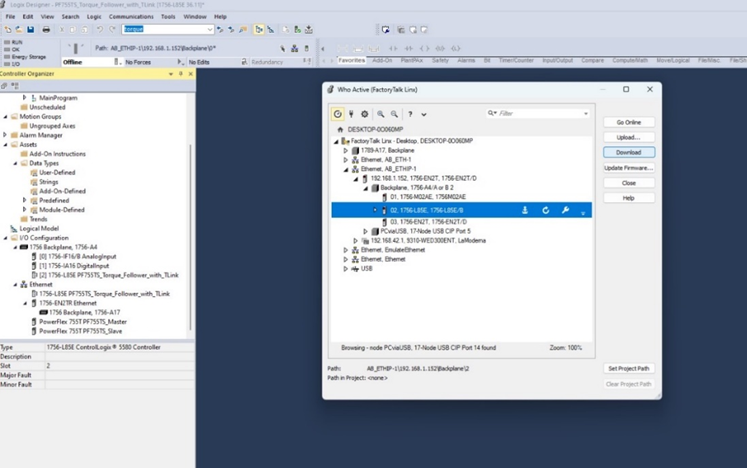
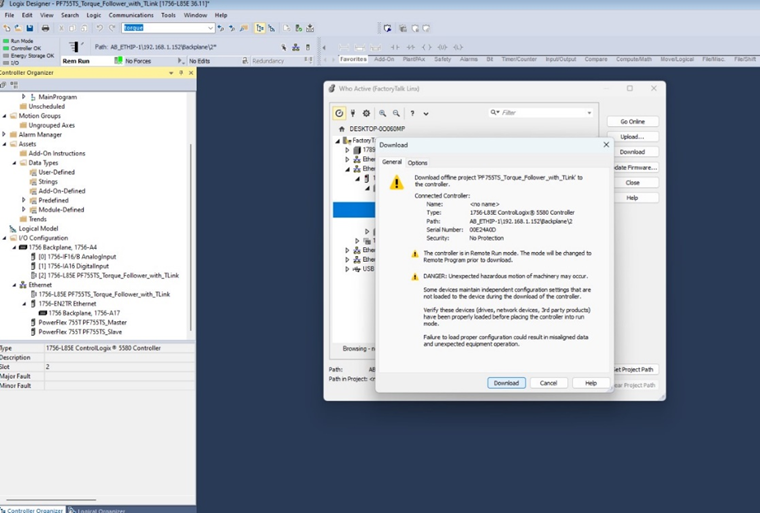
2 - On the menu bar, click on “communication” and choose “download” from the options that appear, then click again on the button in the window that opens, as shown in the following image.
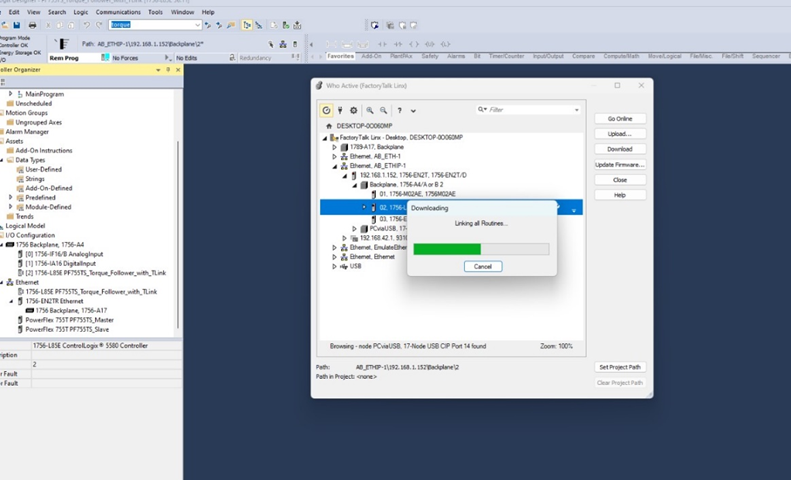
3 - We wait for the program to download to the controller
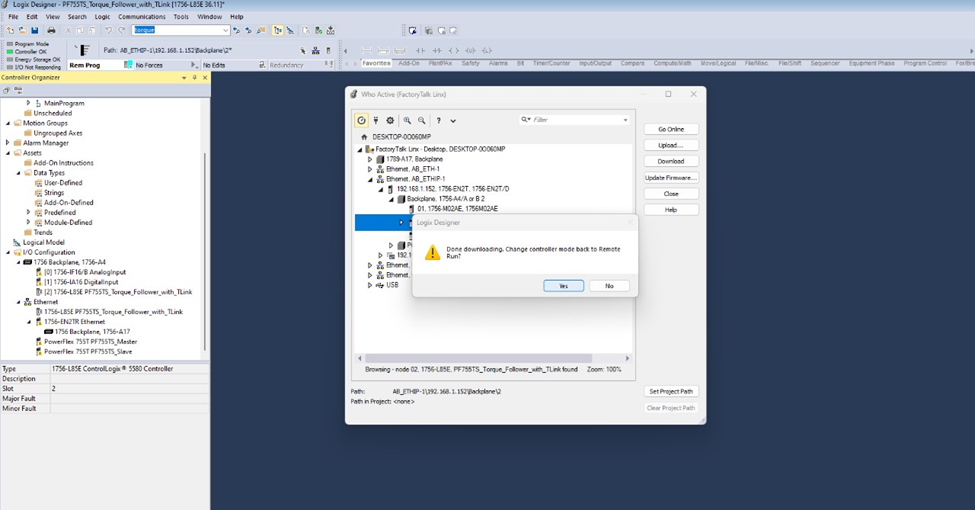
4 - Finally we click on the Yes button on the window that appears after the program is loaded into the controller, this, to change the controller mode to “Remote Run”
Application and Configuration of a Torque Follower System with PowerFlex 755T- and the use of the TLink Module (FO Module)
Version 1.0 - December 2024