Descargas

¿Para qué es esto?
Simplifique el cálculo del par de retroalimentación del motor en unidades de par para servomotores, así como la conversión del par máximo de un valor dado en unidades de par a porcentaje.
Características Generales:
El uso del bloque o AOI (por Add-On Instruction) es extremadamente simple, simplemente abra el archivo adjunto etiquetado como "AOI_TorqueCalculator_ForServoMotor - Application Code.ACD" y cópielo en su archivo de proyecto.
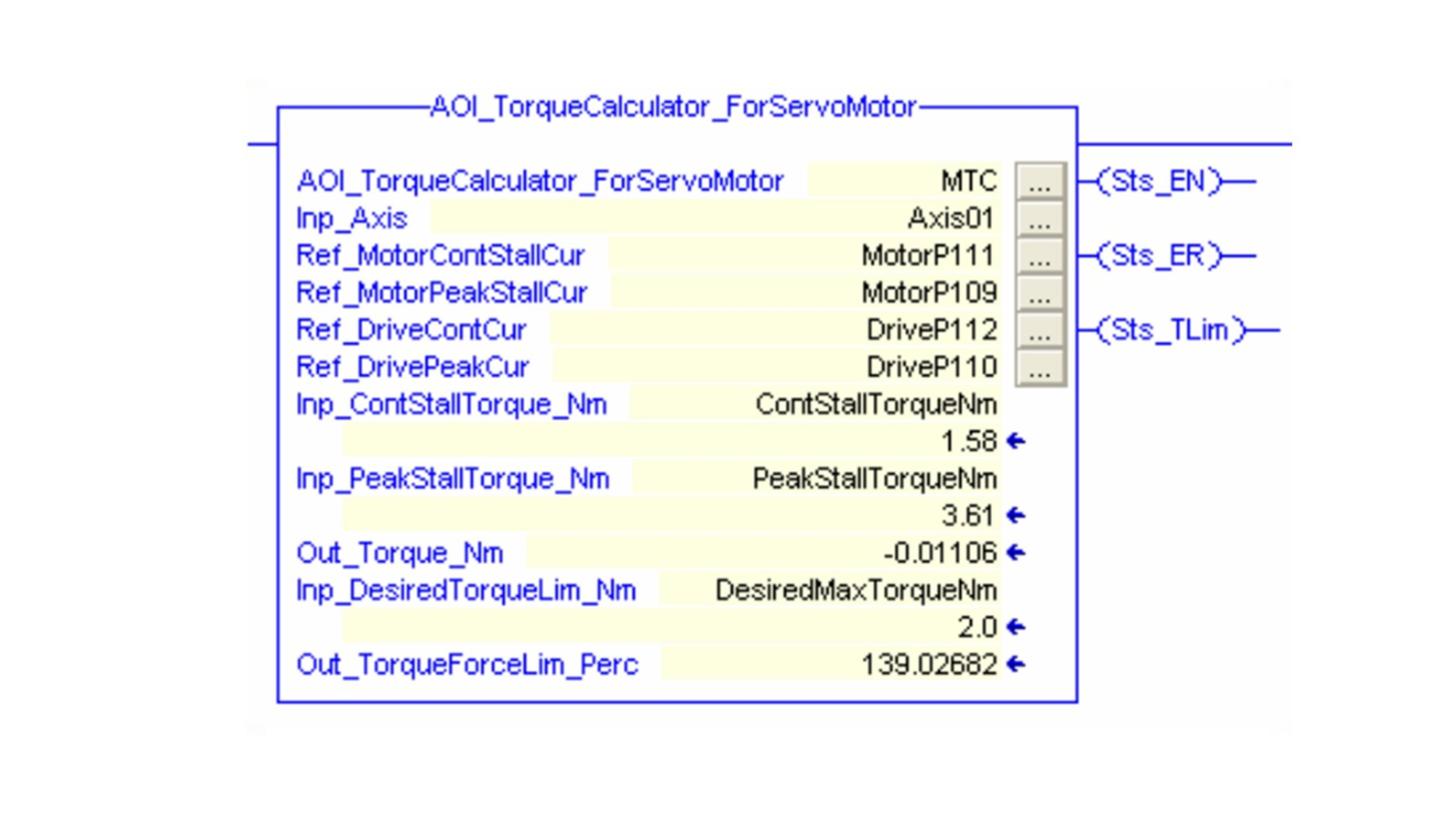
La instrucción complementaria debería verse así:
Limitaciones/Desventajas:
Se puede usar solo con Servodrives con red de Sercos.
¿Cómo puedo hacer que funcione?
La AOI_TorqueCalculator_ForServoMotor calcula automáticamente la retroalimentación de par del motor en unidades de par. Este AOI también puede calcular el par máximo/fuerza Lim en porcentaje a partir de un límite de par máximo deseado dado en unidades de par.
Este AOI está constituido por tres conjuntos de parámetros: un conjunto para la configuración del AOI, un conjunto para convertir la retroalimentación de par de % a unidades de par, y un conjunto para convertir el par máximo/fuerza lim de unidades de par a %.
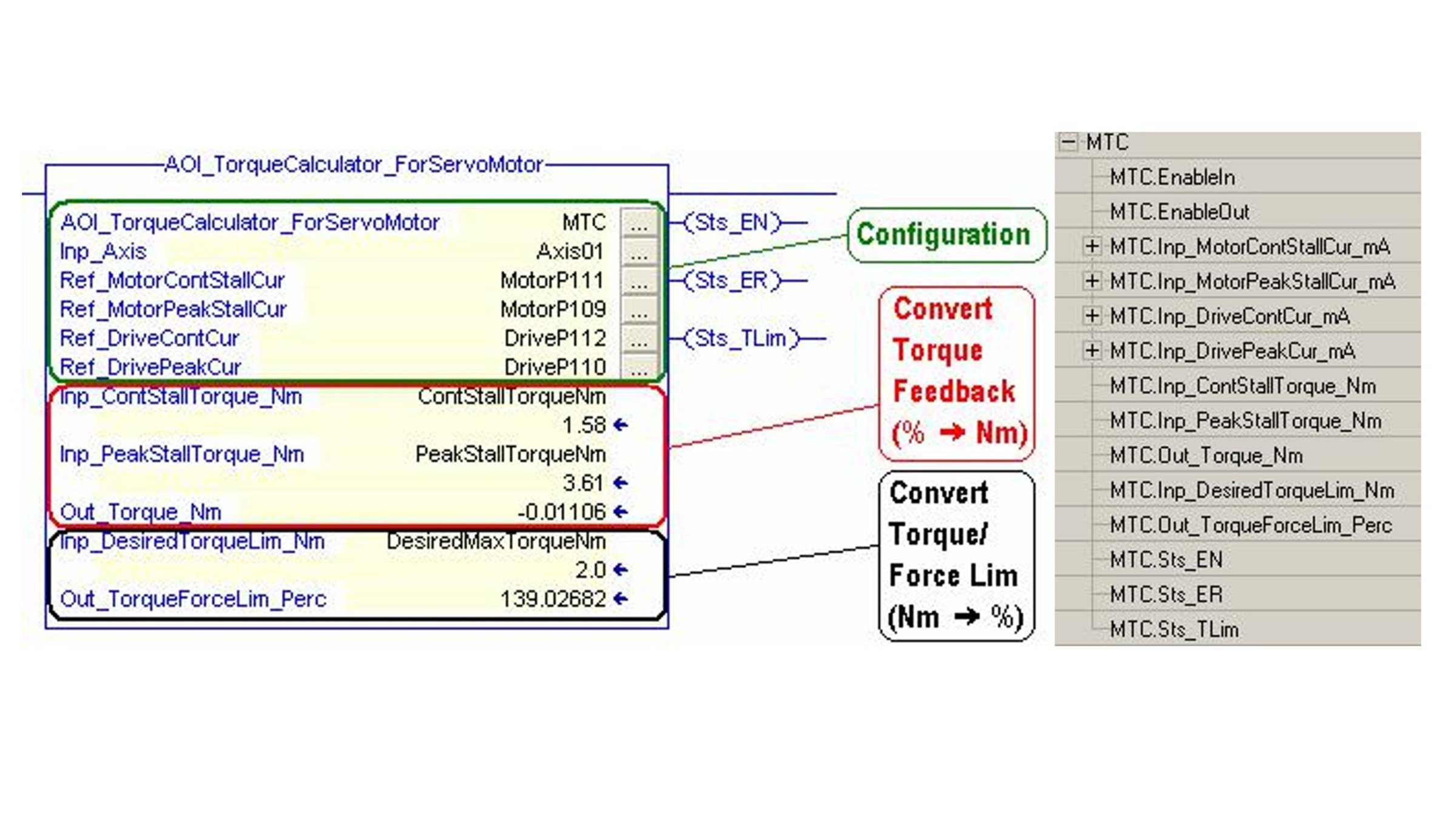
El usuario solo necesita ingresar dos parámetros del motor en el AOI: Par de pérdida continuo y Par de pérdida máximo que se encuentran en las hojas de datos. Todos los demás parámetros necesarios en este AOI se leen automáticamente de la unidad cuando este AOI está habilitado. Este AOI convierte continuamente la retroalimentación de torque de porcentaje a una unidad de toque determinada mientras está habilitado. El resultado se coloca en el parámetro Out_Torque_Nm. La unidad de par es la misma de los parámetros Inp_ContStallTorque_Nm y Inp_PeakStallTorque_Nm. Mientras tanto, este AOI se puede utilizar para calcular el parámetro Par máximo/Fuerza Lim a partir del par introducido en el parámetro Inp_DesiredTorqueLim_Nm, que corresponde al par máximo requerido para una aplicación en particular. El parámetro Inp_DesiredTorqueLim_Nm se introduce en unidades de par y el resultado para el par máximo/fuerza Lim almacenado en el parámetro Out_ForceTorqueLim_Perc se da en porcentaje.
Este AOI debe permanecer habilitado para calcular la retroalimentación de par en una unidad de par determinada.
AOI Control
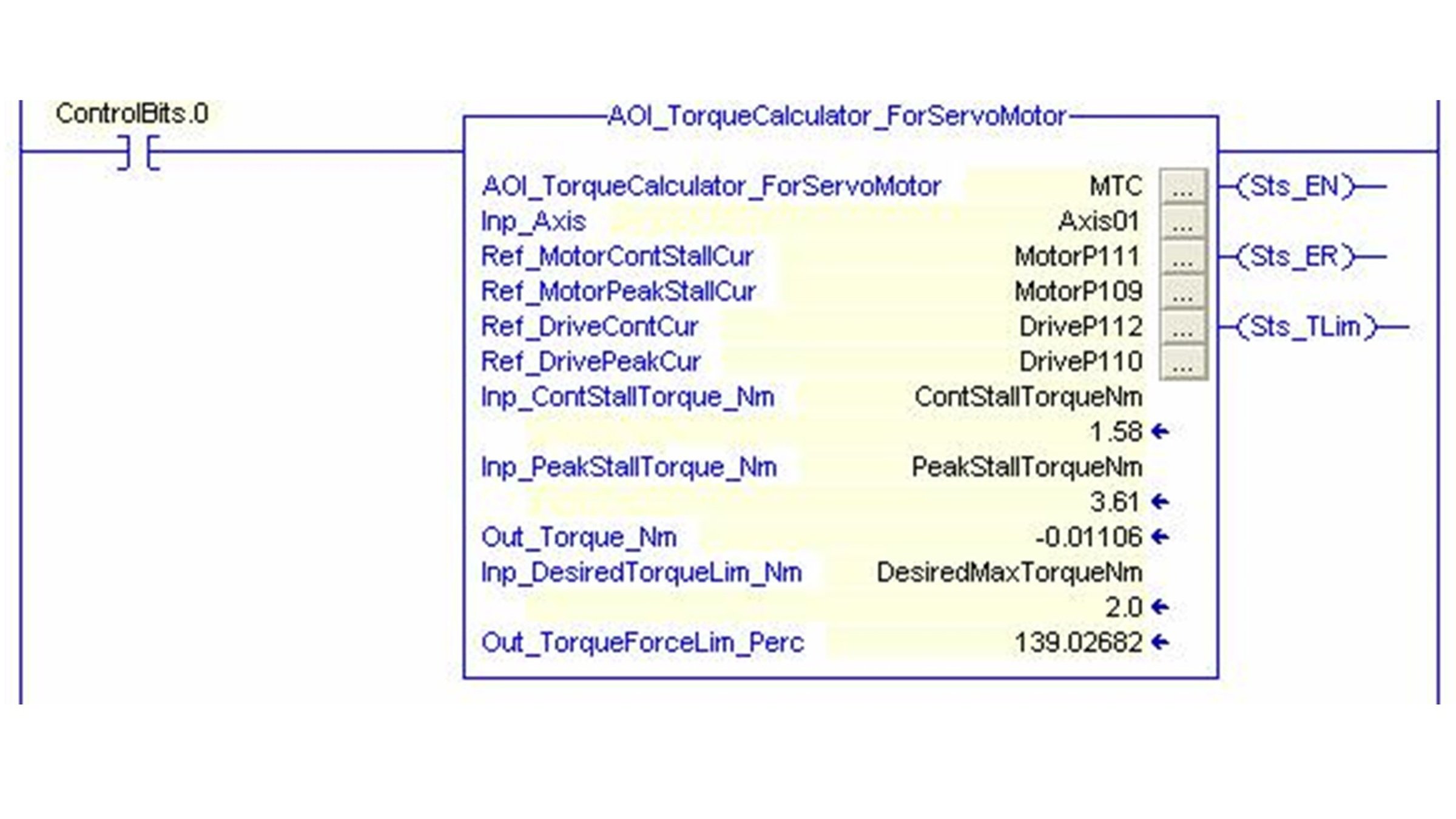
Por lo general, la instrucción AOI_TorqueCalculator_ForServoMotor se puede ejecutar cuando es necesario leer la retroalimentación de par en unidades de par o cuando es necesario calcular el par máximo/fuerza Lim para un límite de par específico, como se muestra a continuación.
Apéndice: Definiciones de parámetros
Inp_Axis:
Eje (estructura de datos Servo_Axis_Drive) que tendrá unidades de par convertidas.
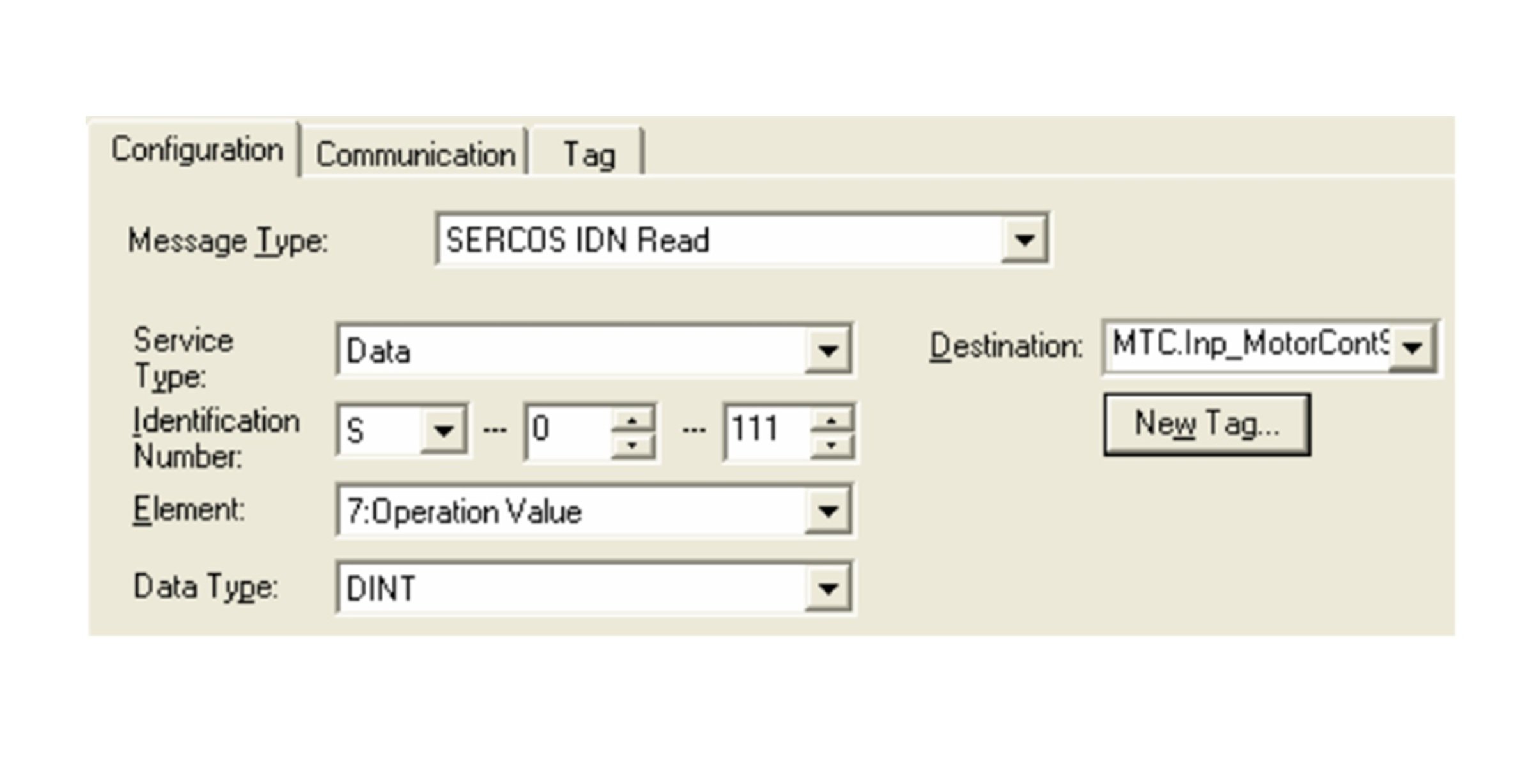
Ref_MotorContStallCur:
Se trata de una etiqueta de tipo de datos Message. Este parámetro se utiliza para leer la corriente de parada continua del motor del variador. La corriente de parada continua del motor es el parámetro 111 (S:0:111) en un accionamiento Kinetix. La etiqueta Ref_MotorContStallCur se configura en el AOI como se muestra a continuación. El destino es la etiqueta MTC. Inp_DriveContCur_mA.
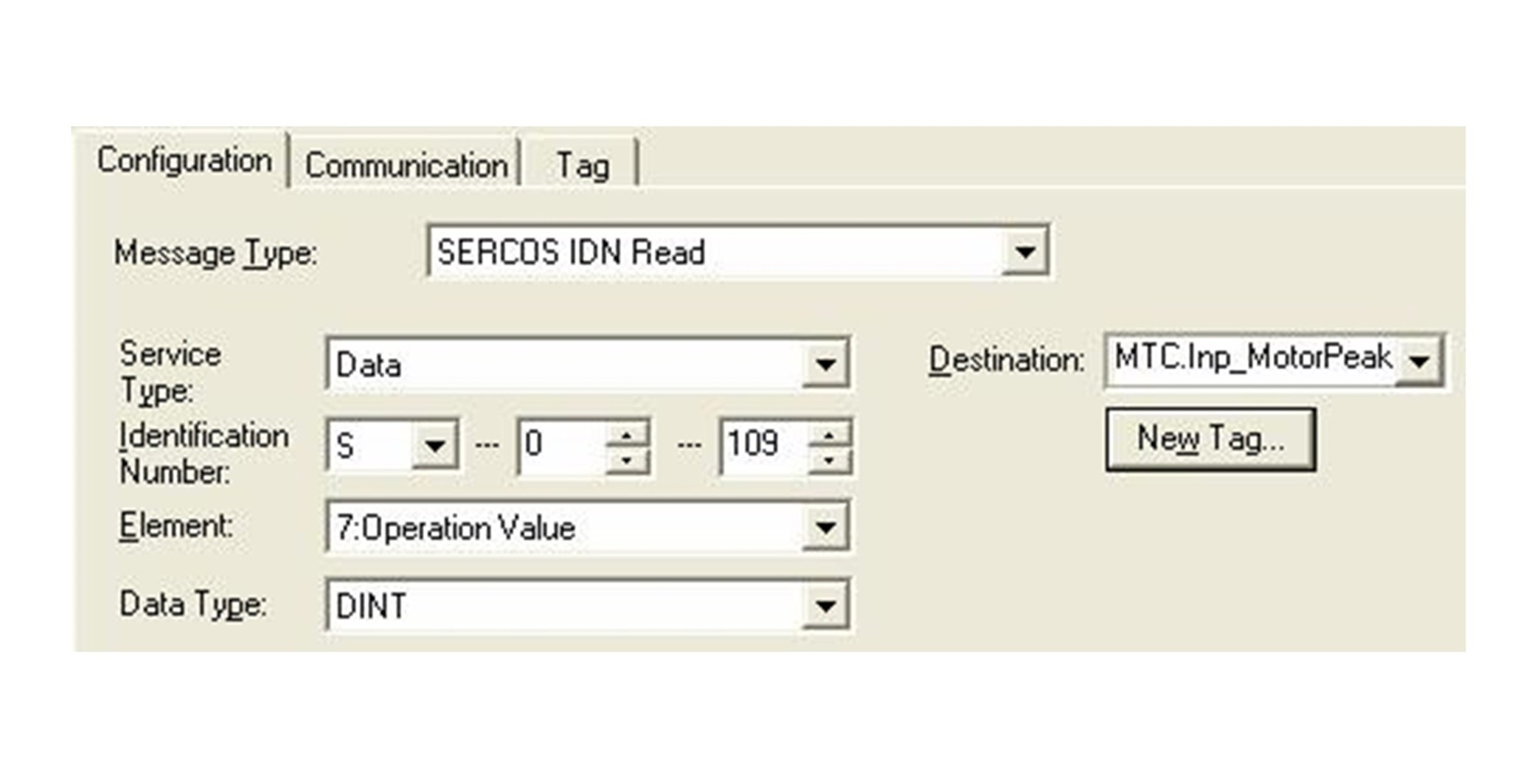
Ref_MotorPeakStallCur:
Se trata de una etiqueta de tipo de datos Message. Este parámetro se utiliza para leer la corriente de pérdida máxima del motor del variador. La corriente máxima continua del motor es el parámetro 109 (S:0:109) en un variador Kinetix. La etiqueta Ref_MotorPeakStallCur se configura en el AOI como se muestra a continuación. El destino es la etiqueta MTC. Inp_MotorPeakStallCur_mA.
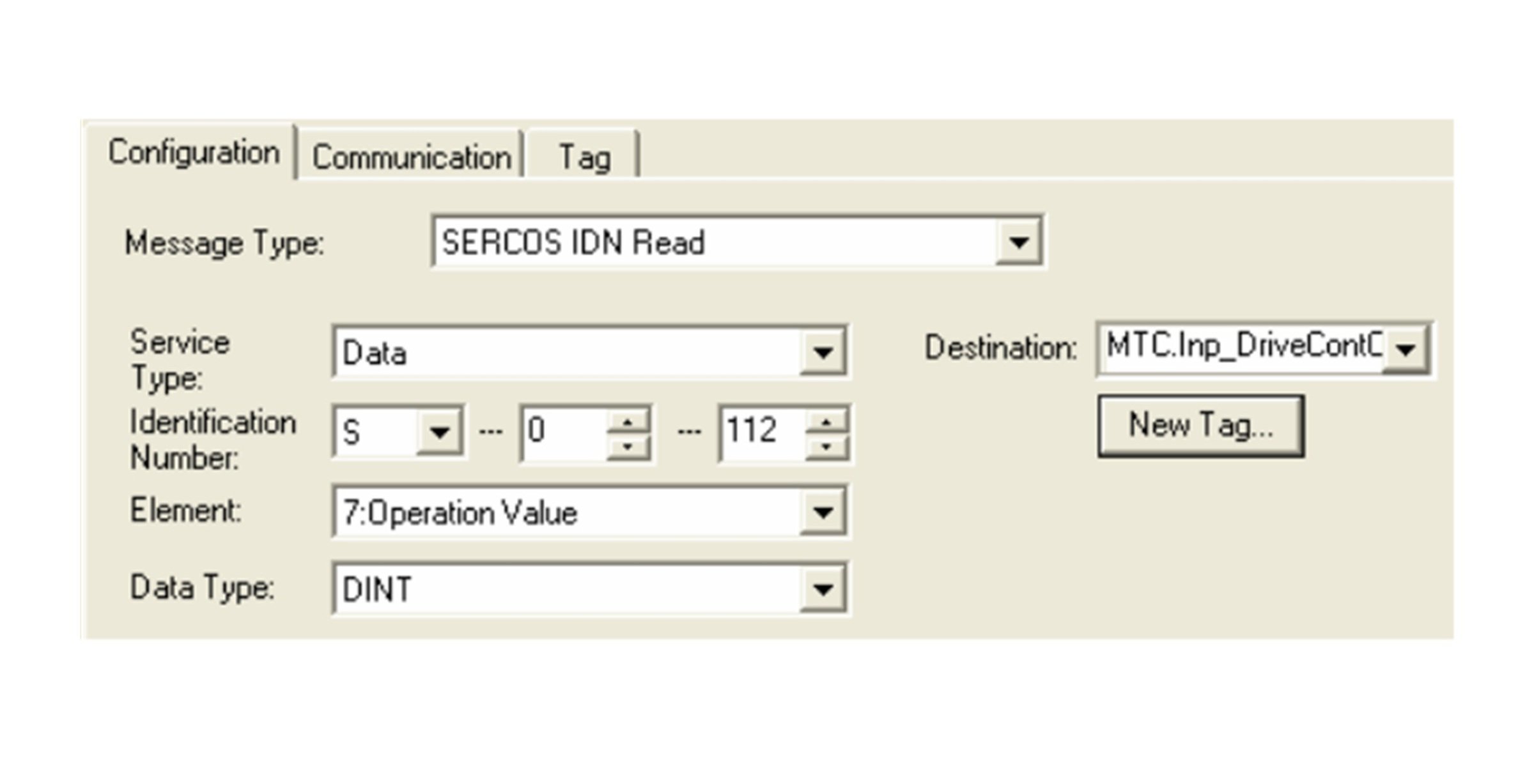
Ref_DriveContCur:
Se trata de una etiqueta de tipo de datos Message. Este parámetro se utiliza para leer la corriente continua de la unidad de la unidad. La corriente continua de la unidad es el parámetro 112 (S:0:112) en una unidad Kinetix. La etiqueta Ref_DriveContCur se configura en el AOI como se muestra a continuación. El destino es la etiqueta MTC. Inp_DriveContCur_mA.
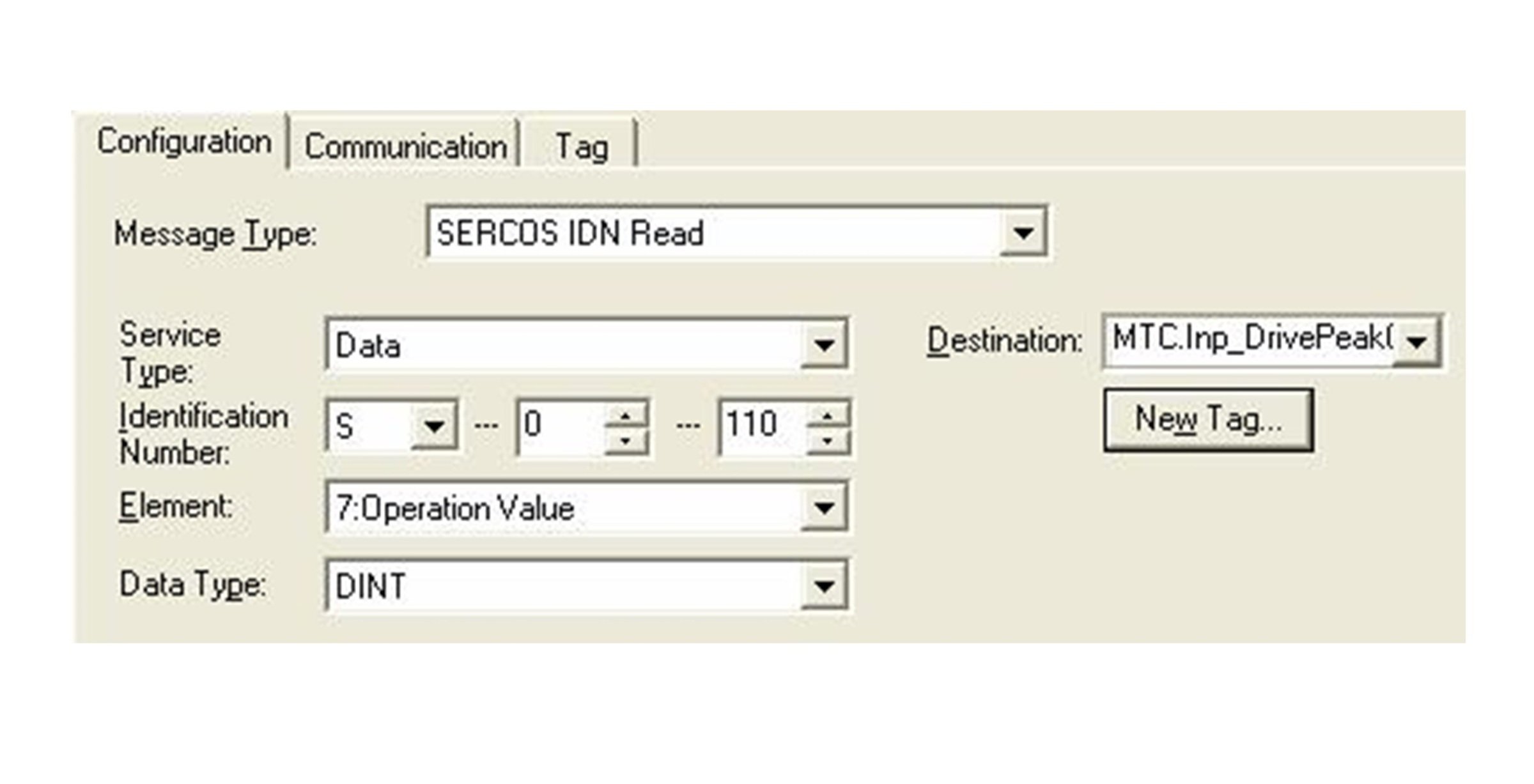
Ref_DrivePeakCur:
Se trata de una etiqueta de tipo de datos Message. Este parámetro se utiliza para leer la corriente máxima de la unidad de la unidad. La corriente máxima de la unidad es el parámetro 110 (S:0:110) en una unidad Kinetix. La etiqueta Ref_DrivePeakCur se establece en el AOI como se muestra a continuación. El destino es la etiqueta MTC. Inp_DrivePeakCur_mA.
Inp_ContStallTorque_Nm:
Esta es una etiqueta de tipo de datos REAL. El usuario utiliza este parámetro para introducir el par de parada continua del motor, que se encuentra en la placa de identificación del motor o en la Guía de selección de movimiento. Este parámetro se muestra dado en Nm. Sin embargo, se puede utilizar cualquier otra unidad de torsión si la Inp_PeakStallTorque_Nm también se ajusta en la misma unidad de toque. Por lo tanto, la retroalimentación de par dada en el Out_Torque_Nm también se dará en esta misma unidad de torque.
Inp_PeakStallTorque_Nm:
Esta es una etiqueta de tipo de datos REAL. El usuario utiliza este parámetro para introducir el par de parada máximo del motor, que se encuentra en la Guía de selección de movimiento.
Out_Torque_Nm:
Esta es una etiqueta de tipo de datos REAL. Este parámetro muestra la retroalimentación de par convertida de porcentaje a la unidad de par dada por los parámetros Inp_ContStallTorque_Nm y Inp_PeakStallTorque_Nm.
Inp_DesiredTorqueLim_Nm:
Esta es una etiqueta de tipo de datos REAL. Este parámetro se utiliza para introducir en unidades de par el límite de par para una aplicación concreta. El AOI convierte este par de unidades de par a porcentaje. Este par en porcentaje es el par máximo/fuerza Lim que se introducirá manualmente en la pestaña Límites de las Propiedades del eje. El par introducido en este parámetro debe estar en la misma unidad que los parámetros Inp_ContStallTorque_Nm y Inp_PeakStallTorque_Nm.
Out_TorqueForceLim_Perc:
Esta es una etiqueta de tipo de datos REAL. Este parámetro devuelve el par máximo/fuerza Lim necesario para limitar el par motor al valor introducido en el parámetro Inp_DesiredTorqueLim_Nm. Este parámetro se da en porcentaje.
Sts_EN:
El bit de habilitación se establece mientras el peldaño está encendido.
Sts_TLim:
Este bit de límite de par se establece cuando el valor introducido en el parámetro Inp_DesiredTorqueLim_Nm es superior al par que puede suministrar el sistema de accionamiento del motor.
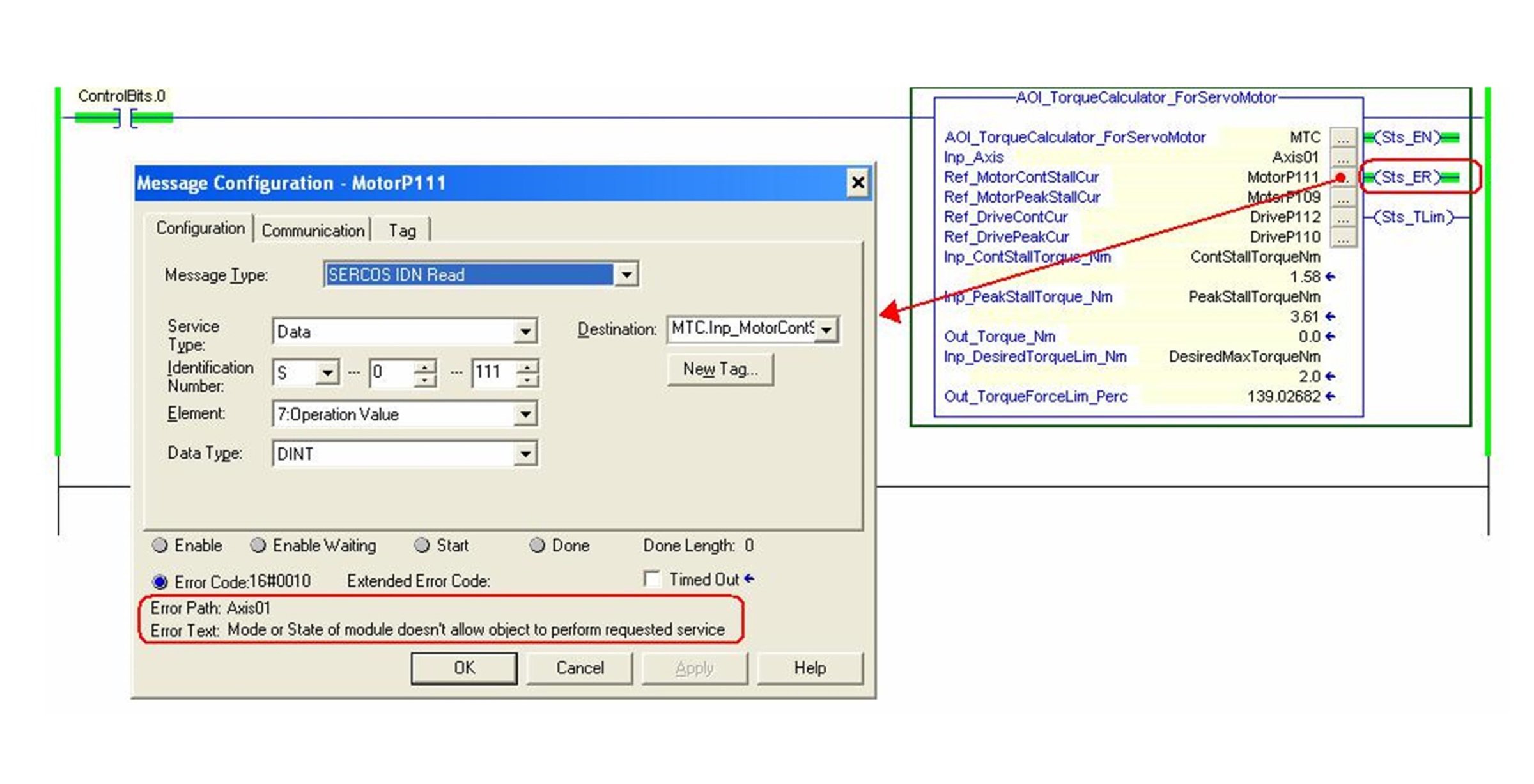
Sts_ER:
El bit de error se establece si las instrucciones de mensaje utilizadas para leer los parámetros de la unidad no se comunican con la unidad. Este bit se restablece cuando se habilita el AOI. Cuando se produce un error, el mensaje de error se puede leer en la ventana Configuración de mensajes, a la que se puede acceder pulsando la casilla junto al nombre de la etiqueta, como se muestra a continuación.
Inp_MotorContStallCur_mA:
Se trata de una etiqueta de tipo de datos DINT. Este parámetro es el destino en el mensaje Ref_MotorContStallCur. Este parámetro contiene la corriente de pérdida continua del motor en mA leída desde el variador por el mensaje Ref_MotorContStallCur.
Inp_MotorPeakStallCur_mA:
Se trata de una etiqueta de tipo de datos DINT. Este parámetro es el destino en el mensaje Ref_MotorPeakStallCur. Este parámetro contiene la corriente de pérdida máxima del motor en mA leída desde el variador por el mensaje Ref_MotorPeakStallCur.
Inp_DriveContCur_mA:
Se trata de una etiqueta de tipo de datos DINT. Este parámetro es el destino en el mensaje Ref_DriveContCur. Este parámetro contiene la corriente continua de la unidad en mA leída desde la unidad por el mensaje Ref_DriveContCur.
Inp_DrivePeakCur_mA:
Se trata de una etiqueta de tipo de datos DINT. Este parámetro es el destino en el mensaje Ref_DrivePeakCur. Este parámetro contiene la corriente máxima de la unidad en mA leída desde la unidad por el mensaje Ref_DrivePeakCur.
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
¿Necesita ayuda?
Si necesita ayuda con alguna aplicación o tiene comentarios acerca del Innovation Center, por favor contáctenos.
