Descargas

¿Para qué sirve esto?
Esta aplicación explica cómo usar la secuencia Home to Torque-level en el software Studio 5000, y las consideraciones necesarias al usar este método de referenciado del eje. Este documento proporciona un ejemplo de una rutina típica de homing.
El referenciado Home to torque-level es un proceso que referencia a una posición conocida monitoreando el torque mientras se mueve un eje hacia un tope mecánico. Una vez que el nivel de torque real alcanza o excede un nivel de torque especificado durante un tiempo establecido de 500 ms, se establece un bit de estado en el controlador.
Características Generales:
- Secuencia Home to Torque-level
- Pestaña Home de Configuración de Eje
- Pestaña Límites de Configuración de Eje
Ventajas:
Esta secuencia facilita la implementación y configuración rápida del referenciado de un eje cuando se requiere monitorear el torque en el referenciamiento del eje.
Limitaciones/Desventajas:
Esta secuencia está disponible para Controladores CompactLogix / ControlLogix.
¿Es útil para mí?
Este código está definido para aplicaciones de monitoreo de torque mientras se mueve un eje hacia un tope mecánico.
- Áreas de aplicación:
- Alimentos, Manufactura, Bebidas
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
¿Necesita ayuda?
Si necesita ayuda con alguna aplicación o tiene comentarios acerca del Innovation Center, por favor contáctenos.
¿Cómo puedo hacer que funcione?
- Hardware
- Computadora personal con un puerto USB disponible
- Controlador CompactLogix, ControlLogix
- Software
- Studio 5000, versión 21 o posterior
- Conocimientos
- Conocimientos intermedios de programación y configuración en el software Studio 5000: Lenguaje de escalera (LD)
Guía de implementación
Paso 01 - Configurar la pestaña Home del eje
Debido a que el proceso de referenciado por torque requiere movimiento del eje, el modo de referenciado del eje debe configurarse como Activo.
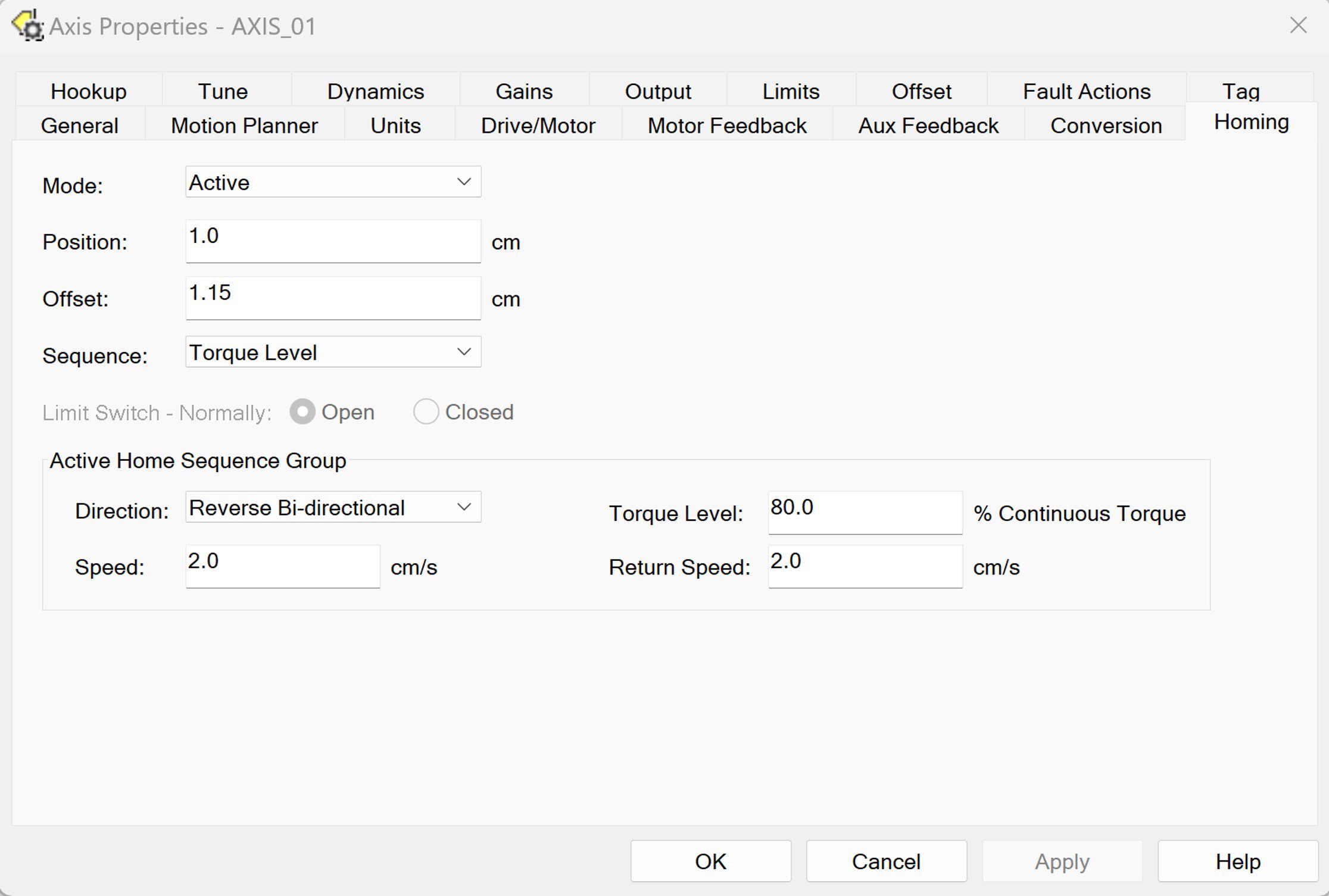
1 - Abrir la pestaña Propiedades del eje. Completar la siguiente configuración. La opción Nivel de torque establece la Posición de referencia después de que el torque de salida alcanza el valor de Nivel de torque, invierte la dirección y se mueve hasta que el bit Torque por encima del umbral de referenciado que está bajo y se establece el bit de estado. Torque Level - Marker establece la Posición de referencia después de que el torque de salida alcanza el valor de Nivel de torque, invierte la dirección y encuentra la marca del encoder.
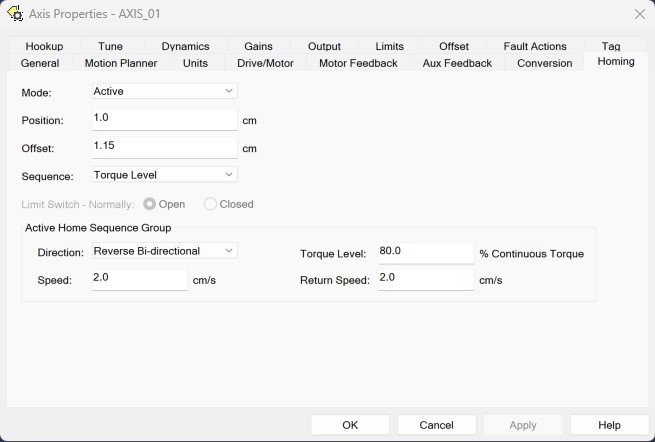
Cuando se selecciona cualquiera de las opciones de referenciado Torque Level o Torque Level - Marker en la pestaña Home, el campo Nivel de torque se activa en el Active Home Sequence Group. Las unidades para este campo son un porcentaje del torque continuo del motor (% Torque continuo) limitado por la relación entre la corriente nominal del drive y la corriente nominal del motor. Este número se interpreta en el drive como un valor absoluto y el rango es 0...al valor TorqueLimitPositive.
Bi-direccional hacia adelante y Bi-direccional hacia atrás son las únicas opciones para el campo Dirección cuando se selecciona la secuencia de referenciado Torque Level o Torque Level - Marker. El referenciado uni-direccional no es posible, porque la secuencia Home to Torque-level depende de un tope mecánico.
Paso 02 - Ajuste del Límite de Torque Bipolar del Drive
Al referenciar un eje a un tope mecánico, establezca el valor de Torque de referencia por encima del valor de torque requerido para mover el sistema, pero lo suficientemente bajo como para no causar problemas con la mecánica del sistema.
Como parte del proceso de referenciado a un límite de torque, limite el valor de Torque Pico a un nivel 10% por encima del valor de Torque de referencia para reducir las tensiones en la mecánica y eliminar la posibilidad de un fallo por sobrecorriente.
El valor del 10% es un punto de partida estimado. Este valor puede necesitar ajustes según los requisitos de la aplicación. Limite el valor de Torque Pico antes de emitir la instrucción de referenciado (MAH) y restablezca el campo de Torque Pico al valor original después de que se complete el referenciado.
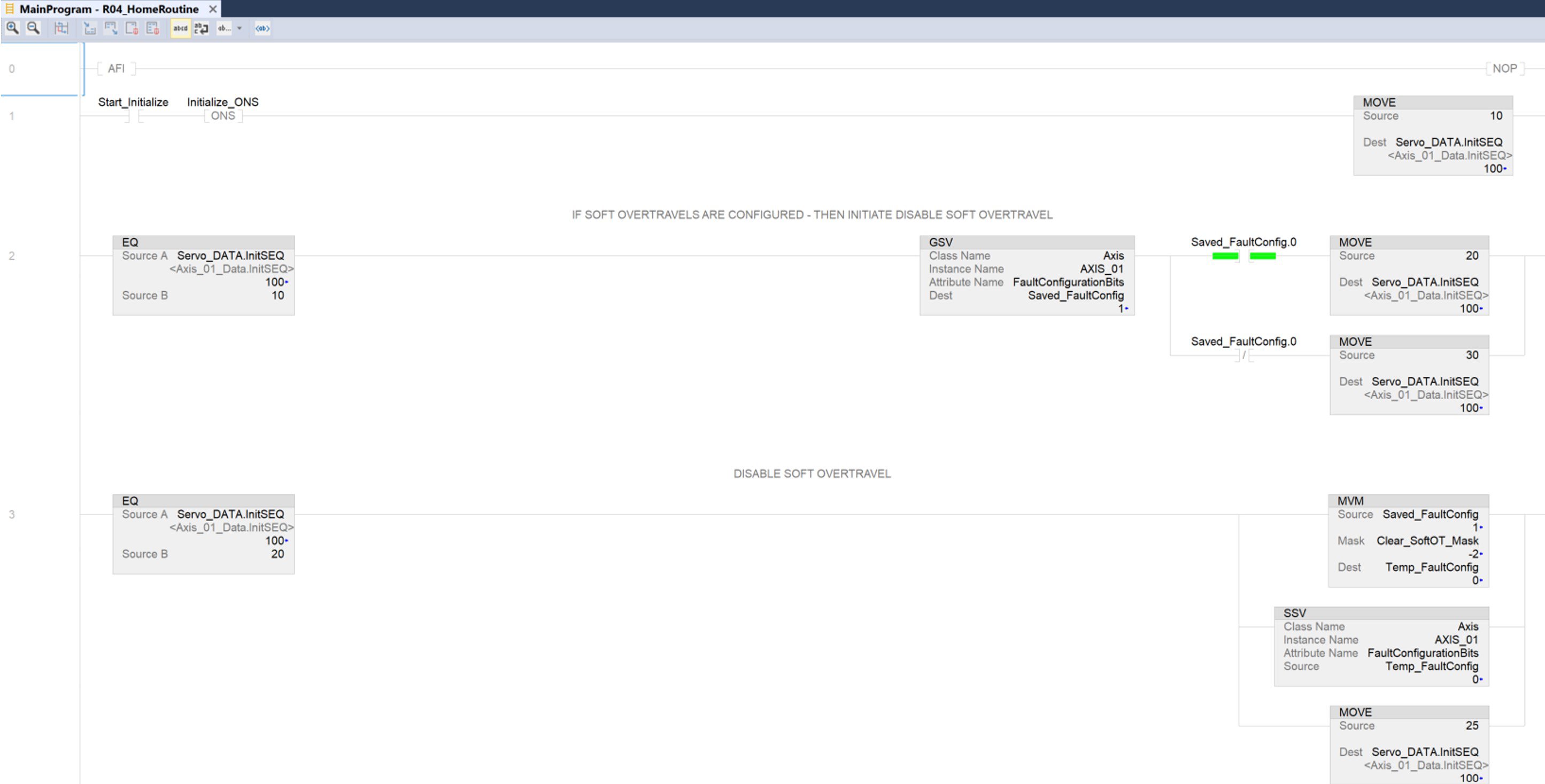
Paso 03 - Deshabilitar el Soft Overtravel Limit
Si la aplicación requiere el uso de Soft Overtravel Limit (en la pestaña Límites) para proteger la mecánica del sistema, los Soft Overtravel Limits deben deshabilitarse para que el eje pueda referenciarse.
Los Soft Overtravel Limits deben deshabilitarse a través de la programación para evitar que ocurra un fallo durante la operación de referenciado, pero deben reactivarse después de que se complete el referenciado.
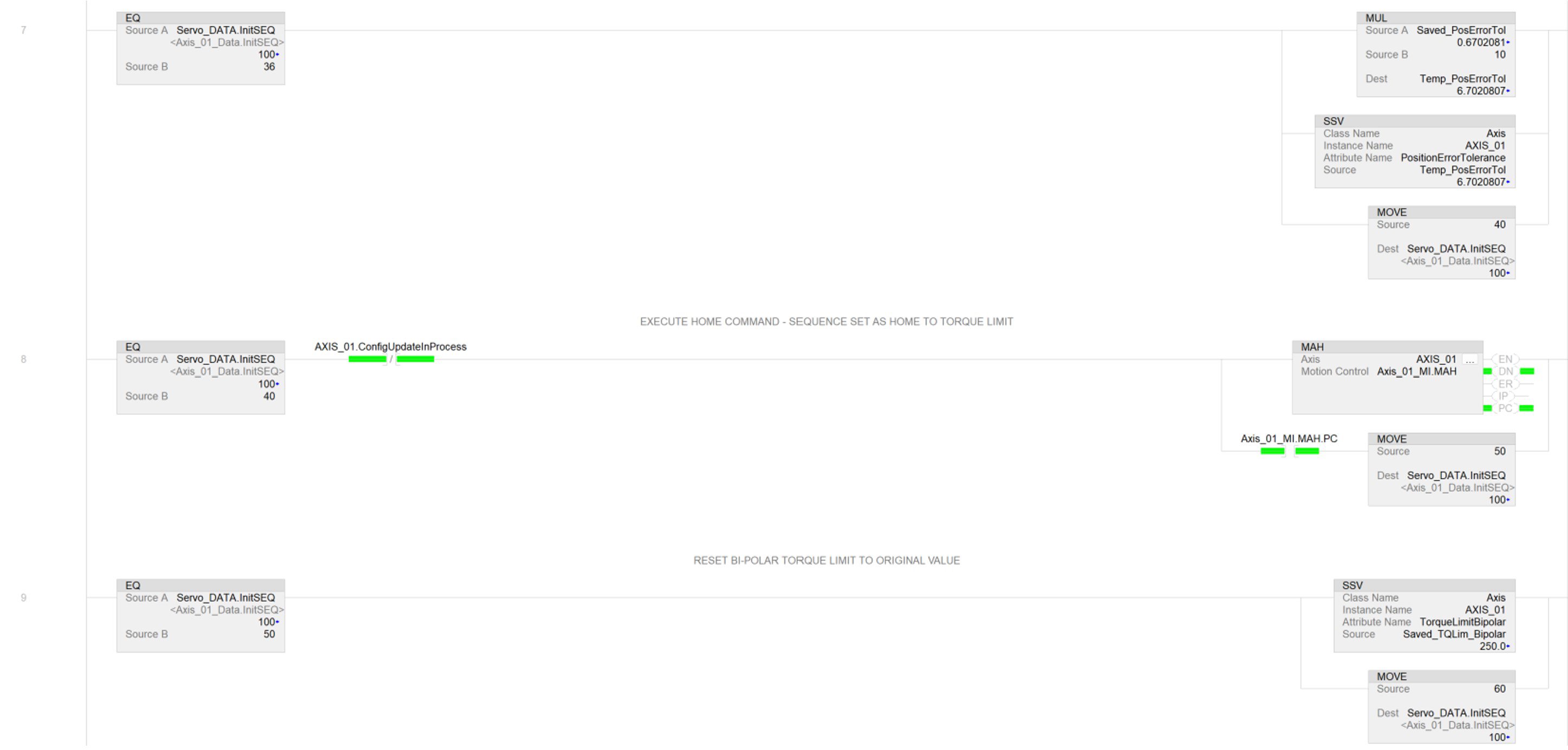
Paso 04 - Secuencia de Programación en Código de Escalera
Esta secuencia muestra cómo ajustar el límite de torque pico y deshabilitar la verificación del Soft Overtravel Limit al referenciarse a un límite de torque. El programa utiliza una metodología de modelo de estado en la que cada escalón de código debe completarse correctamente antes de pasar al siguiente rung.
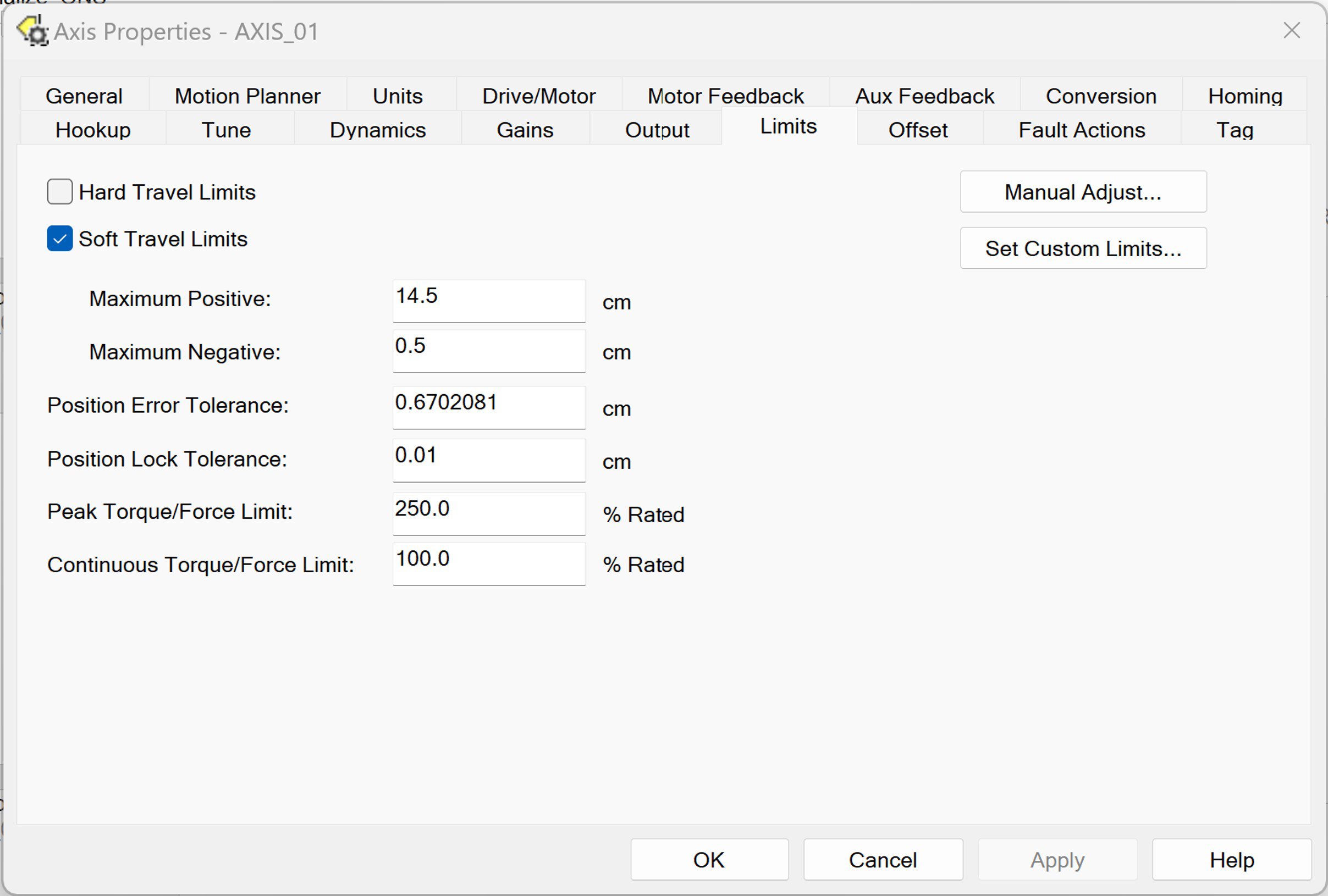
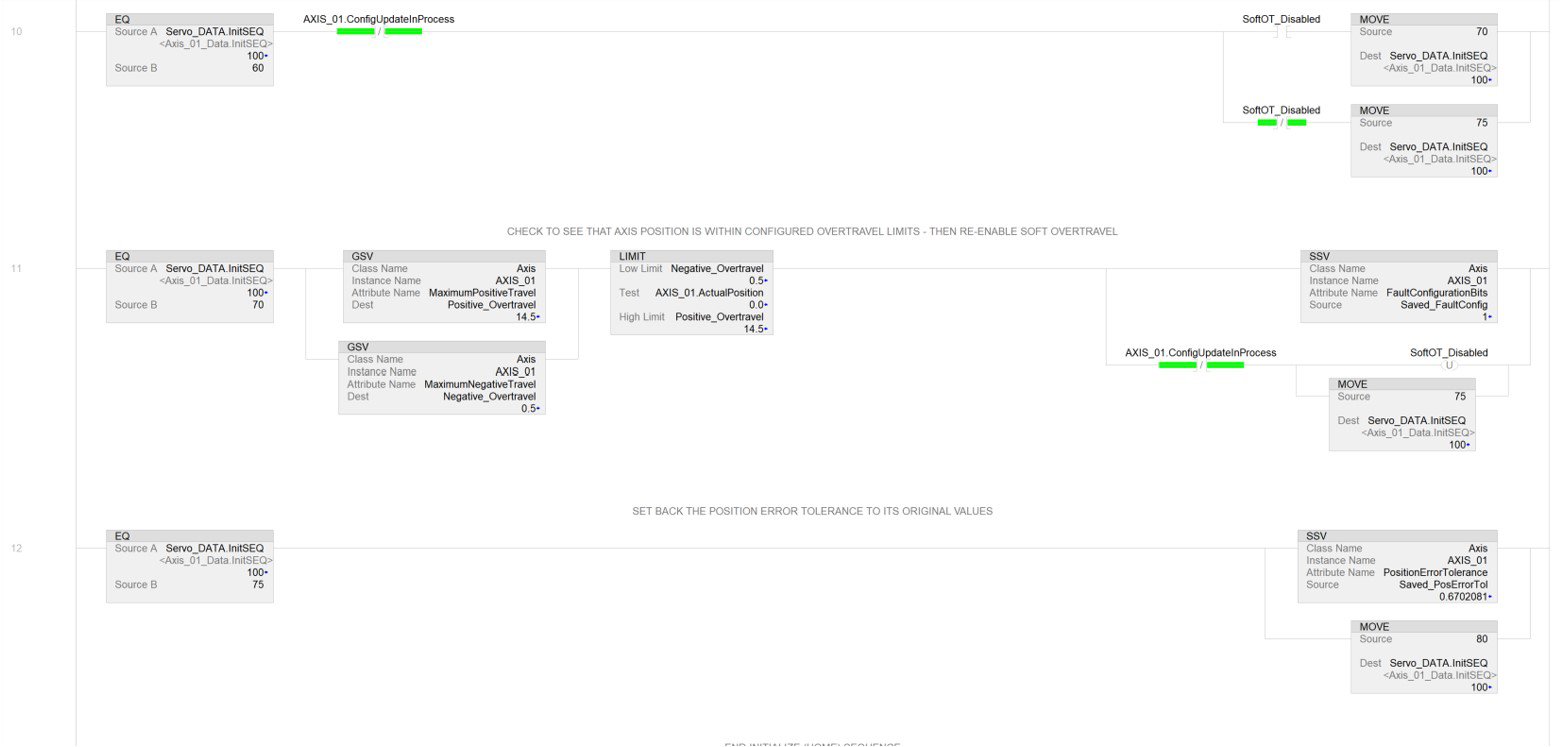
El rung 11 del programa verifica que la posición del eje, después del referenciado, esté dentro de los Soft Overtravel Limits antes de reactivar la verificación del límite de sobrerrecorrido. En este código, se configura un movimiento de compensación de 1.15 cm en la pestaña de referenciado y esa es la posición final de referencia. Los 0.5 cm están dentro de los Soft Overtravel Limits establecidos en la pestaña de Límites.
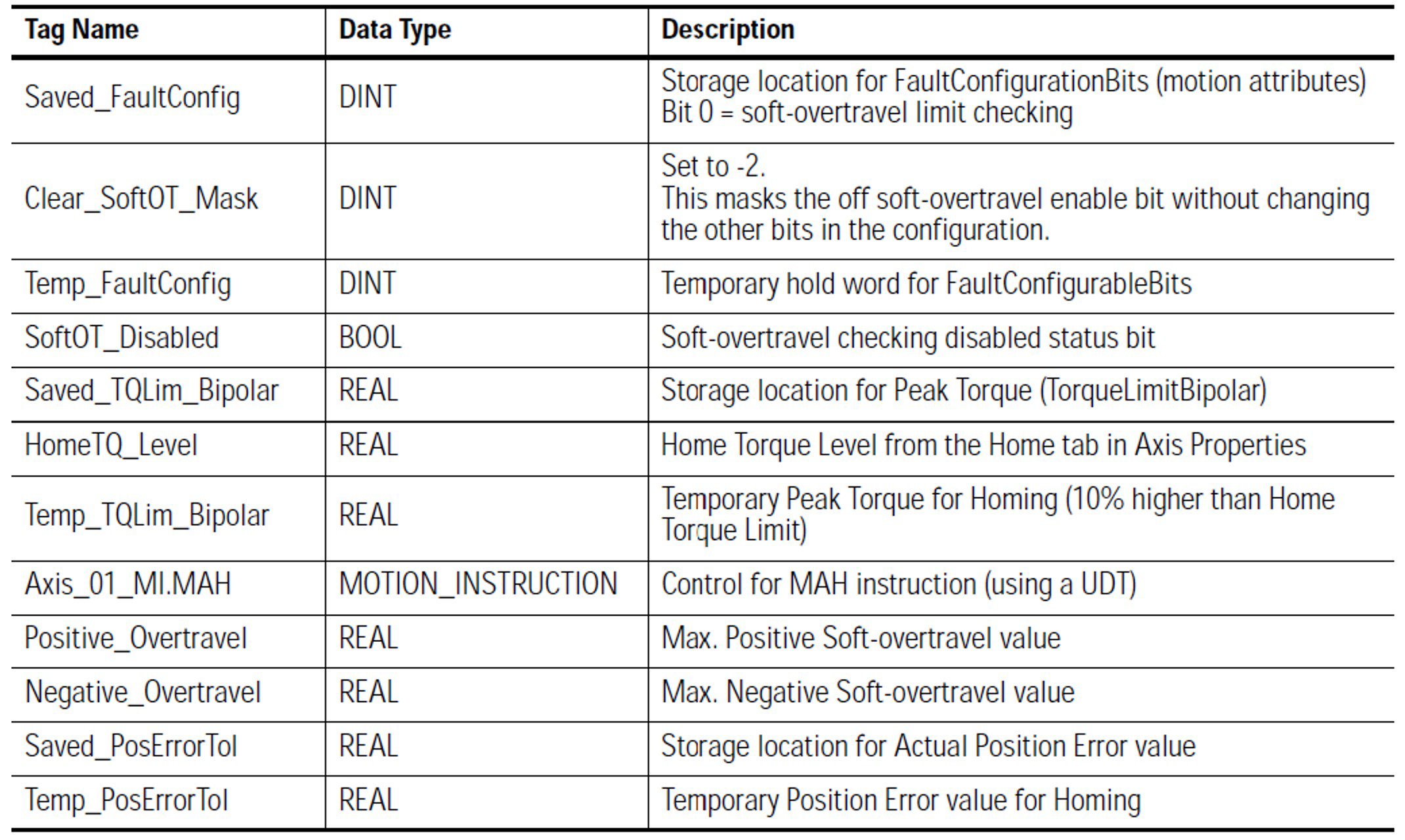
Lista de variables usadas
Pestaña de Homing – Propiedades del Eje
Pestaña de Limites – Propiedades del Eje
Ejemplo de Rutina en Lenguaje Escalera
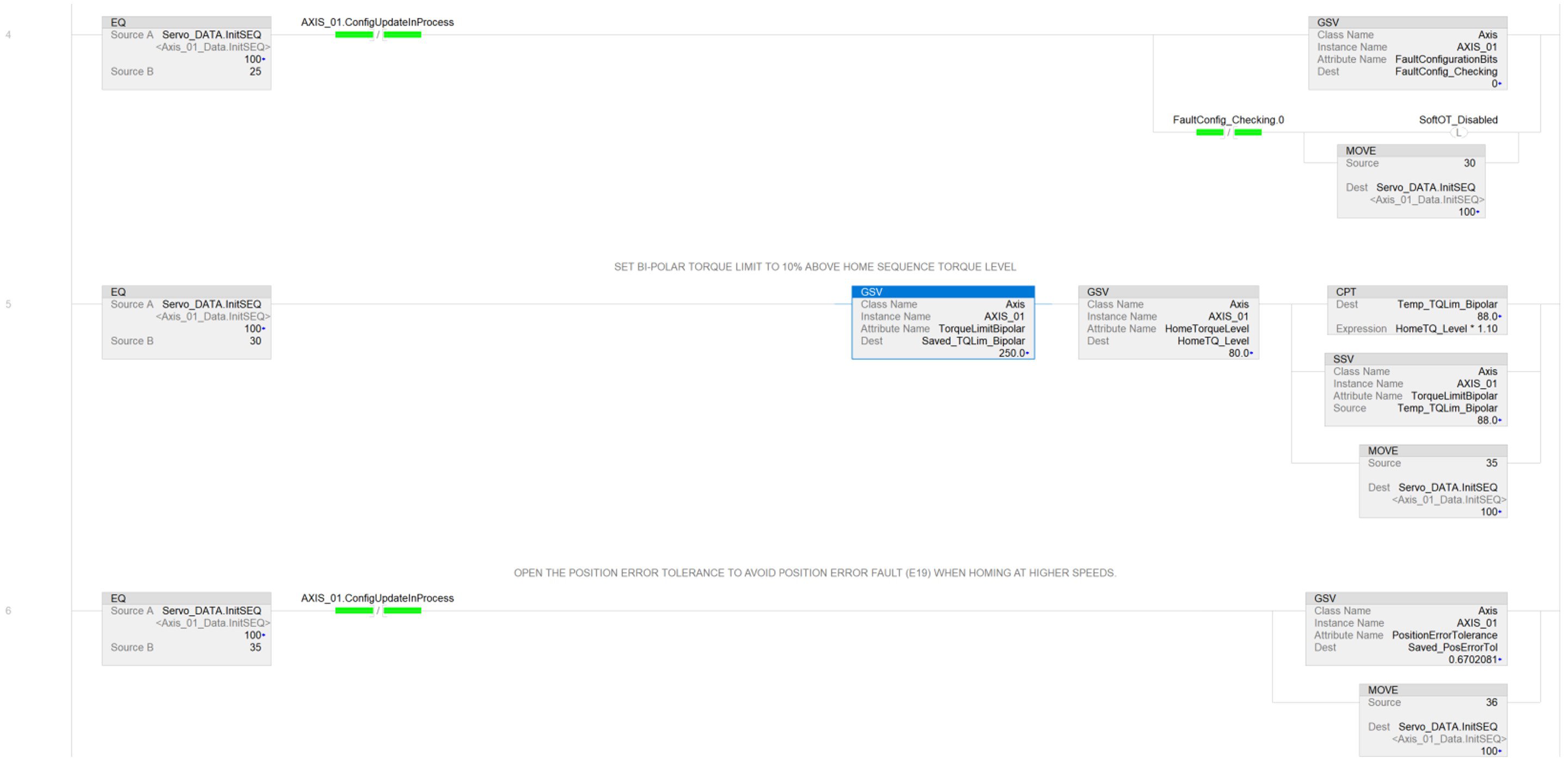

Potencial de Error de Posición
Al ejecutar un procedimiento de referenciado a un límite de torque, existe la posibilidad de un fallo por Error de Posición. Como se mencionó anteriormente, para que el referenciado a un límite de torque se complete, el torque de salida al motor debe alcanzar (o exceder) el nivel de torque especificado durante un tiempo establecido de 500 ms. Durante este tiempo, el eje está contra el tope mecánico, y el error de seguimiento está aumentando en el bucle de posición. Si se excede el valor de Tolerancia de Error de Posición antes de completar la instrucción de referenciado, resultará en un fallo por Error de Posición (E19).
Hay dos maneras de limitar la ocurrencia de un E19:
- Establecer el valor de Tolerancia de Error de Posición en la pestaña Límites de las Propiedades del Eje a un valor lo suficientemente alto como para eliminar la posibilidad de un fallo.
- Modificar el valor de Tolerancia de Error de Posición mediante una instrucción SSV, similar al método utilizado en el programa anterior para cambiar el Límite de Torque Bipolar.
El rung 6 del programa abre la ventana de Error de Posición. Esto permite que el referenciado se complete sin causar un fallo por Error de Posición. El valor original se restablece después de que se complete el referenciado.
Secuencia de Home to Torque Limit en Studio 5000
Versión 1.0 - Agosto de 2024