Descargas

En esta página:
¿Para qué es esto?
La interacción de un Gemelo Digital entre un cobot y un sistema MagneMover LITE (MML) sirve como la base fundamental para cualquier desarrollo de ambas tecnologías a través de Emulate3D. Este proyecto puede ser utilizado para demostrativos que presenten tecnologías MML y robots trabajando en conjunto, o como una plantilla para el desarrollo de modelos de gemelos digitales de estas tecnologías. El software Studio 5000 se utiliza para editar y habilitar la rutina de programación generada por Emulate3D.
El demostrativo del modelo del gemelo digital muestra las capacidades del software Emulate3D en el sector industrial, desde el monitoreo del desempeño de la interacción de múltiples sistemas en un piso de planta; la posibilidad de hacer pruebas de evaluación de sistemas, al implementar adecuaciones digitales y de control en un entorno virtual emulado; y la creación de modelos digitales que emule el comportamiento de los sistemas reales, para proponer modificaciones físicas que optimicen el proceso de producción de la planta.
Al hacer uso de esta aplicación, es posible garantizar la funcionalidad de procesos a implementar, capacitar a operadores y realizar cambios de configuraciones en un entorno virtual, seguro y con alcance inmersivo en el ciberespacio.
Características generales
La integración de un sistema MagneMover LITE y un cobot a través de un gemelo digital ofrece las siguientes características:
- Comunicación bidireccional.
- Coordinación precisa y eficiente de tareas.
- Implementación expedita de tecnología a través de un proceso de programación eficiente y ágil.
- Integración sincrónica de movimientos entre los movers y Cobot.
- Configuración y ajuste eficiente de los parámetros de posición y tiempo en la secuencia de movimiento
Ventajas
- Demostración de la capacidad de Emulate3D.
- Entender la lógica subyacente en el movimiento físico del sistema MML.
- Mostrar la integración física y digital de MML y Cobot.
- Interoperabilidad con sistemas de control.
- Monitoreo de desempeño de los sistemas en tiempo real.
- Reconfiguración flexible de respuesta rápida.
- Adaptabilidad a las variaciones de diferentes procesos.
- Eficiencia energética del sistema.
- Escalabilidad de expansión.
- Estándares de seguridad y calidad.
¿Es útil para mí?
Los Gemelos Digitales permiten la optimización de procesos, donde los fabricantes pueden modelar y analizar sus procesos de producción en un entorno virtual. Gracias a ello, es posible identificar ineficiencias y áreas de mejora; para así, mejorar la productividad y reducir costos. Además, los fabricantes pueden crear un diseño eficiente y asignar todo el equipo correspondientemente, al tiempo que, obtienen estimaciones de producción sin necesidad de realizar pruebas de hardware.
Los fabricantes no necesitan esperar a que se construya una máquina para probar controles y confirmar que la mecánica y la lógica estén funcionando correctamente. Esto se traduce en una reducción del tiempo dedicado a corregir errores encontrados en la etapa de implementación física, lo que representa una reducción de costos. A través de la colaboración de estas tecnologías, los clientes podrán visualizar una transición eficiente para la implementación del gemelo digital en sus líneas de producción, así como los beneficios de su uso.
Tras el inicio de un sistema, con un gemelo digital, se registran datos con tendencias de comportamiento e historial de rendimiento, creando un historial de datos de producción del ciclo de vida del sistema, para tener una referencia que permita realizar mejoras y métodos de entrenamiento operativo.
¿Cómo puedo hacer que funcione?
Hardware:
- Cobot UR5
- Motor MML 1m
- 2 MML Movers
- Controlador de Nodos MML con Fuente de Alimentación
- Compact GuardLogix 5380
- Stratix Switch
- Fuente de Alimentación de 24V
Software:
- Studio 5000 (V35)
- Emulate3D
Conocimientos previos:
- Conocimiento de Motion, ICT y Emulate3D
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
¿Necesita ayuda?
Si necesita ayuda con alguna aplicación o tiene comentarios acerca del Innovation Center, por favor contáctenos.
Guía de instalación

Paso 1:
Identifique las aplicaciones utilizadas para la implementación: Studio 5000 y Emulate3D.
Paso 2
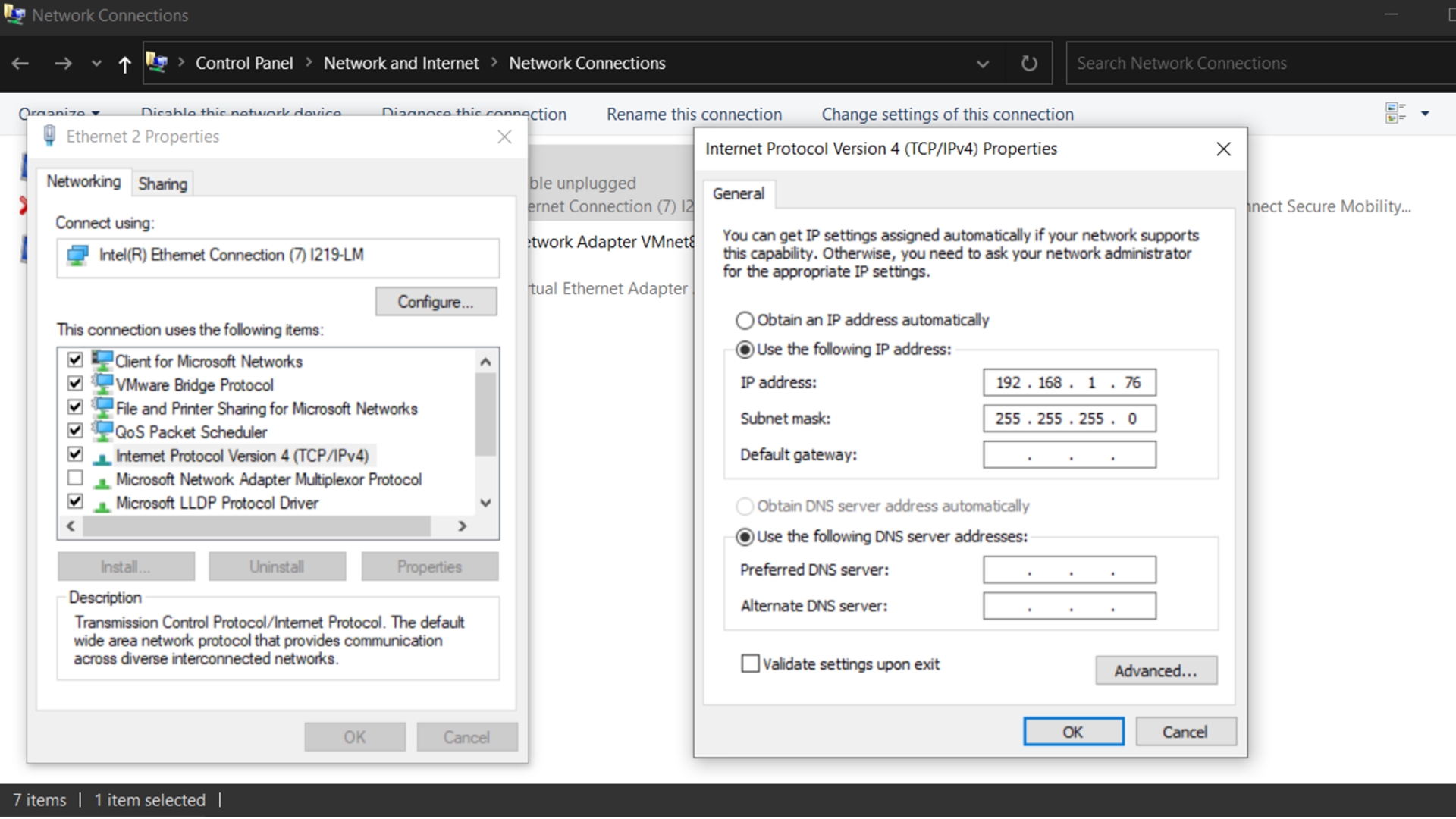
Cambie la dirección IP de los componentes utilizados para ubicarlos en la misma máscara de red:
- 2.1 Controlador de nodos del sistema MML
- 2.2 Computadora
- 2.3 Cobot
- 2.4 Controlador PLC
Paso 3:
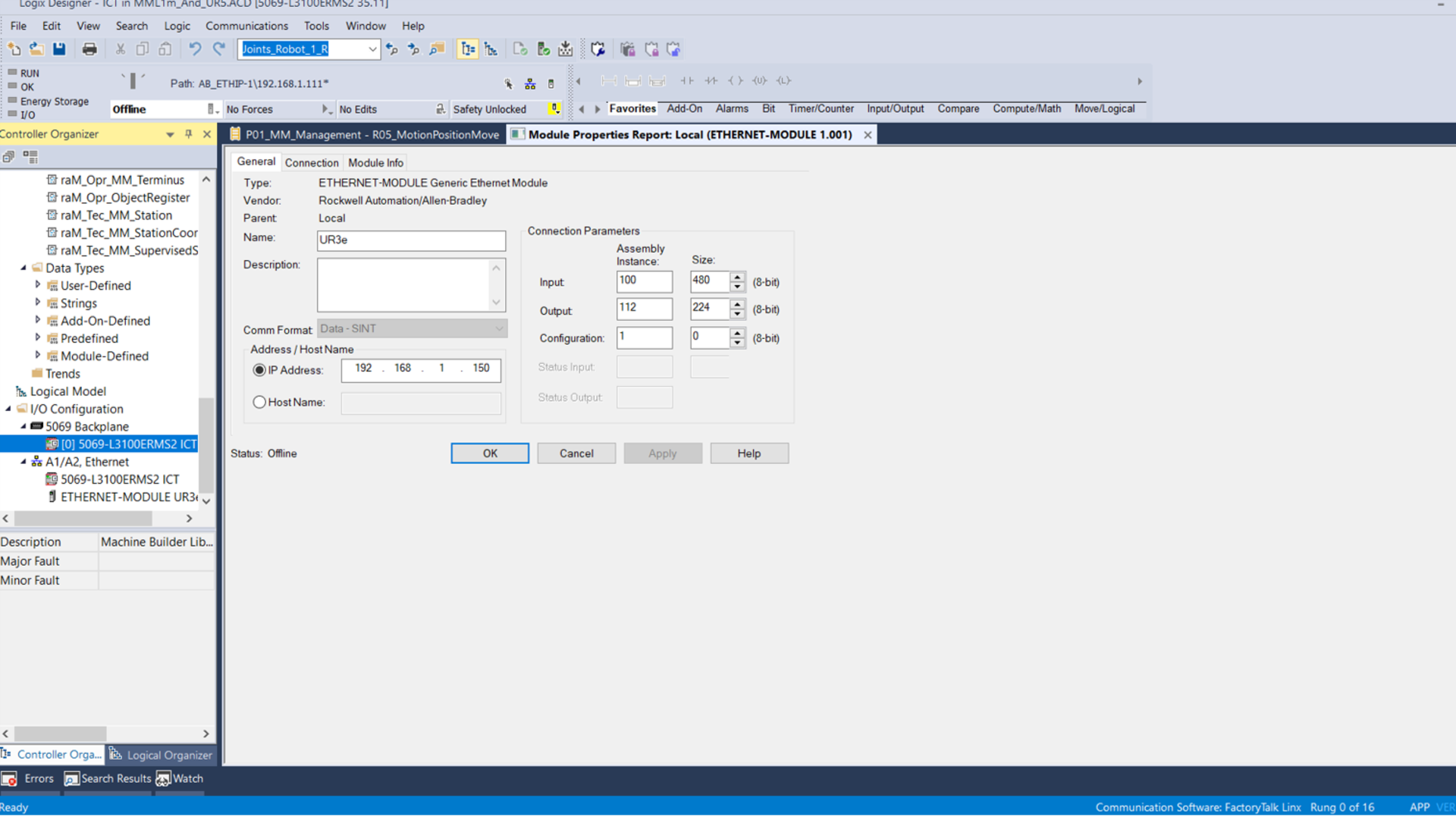
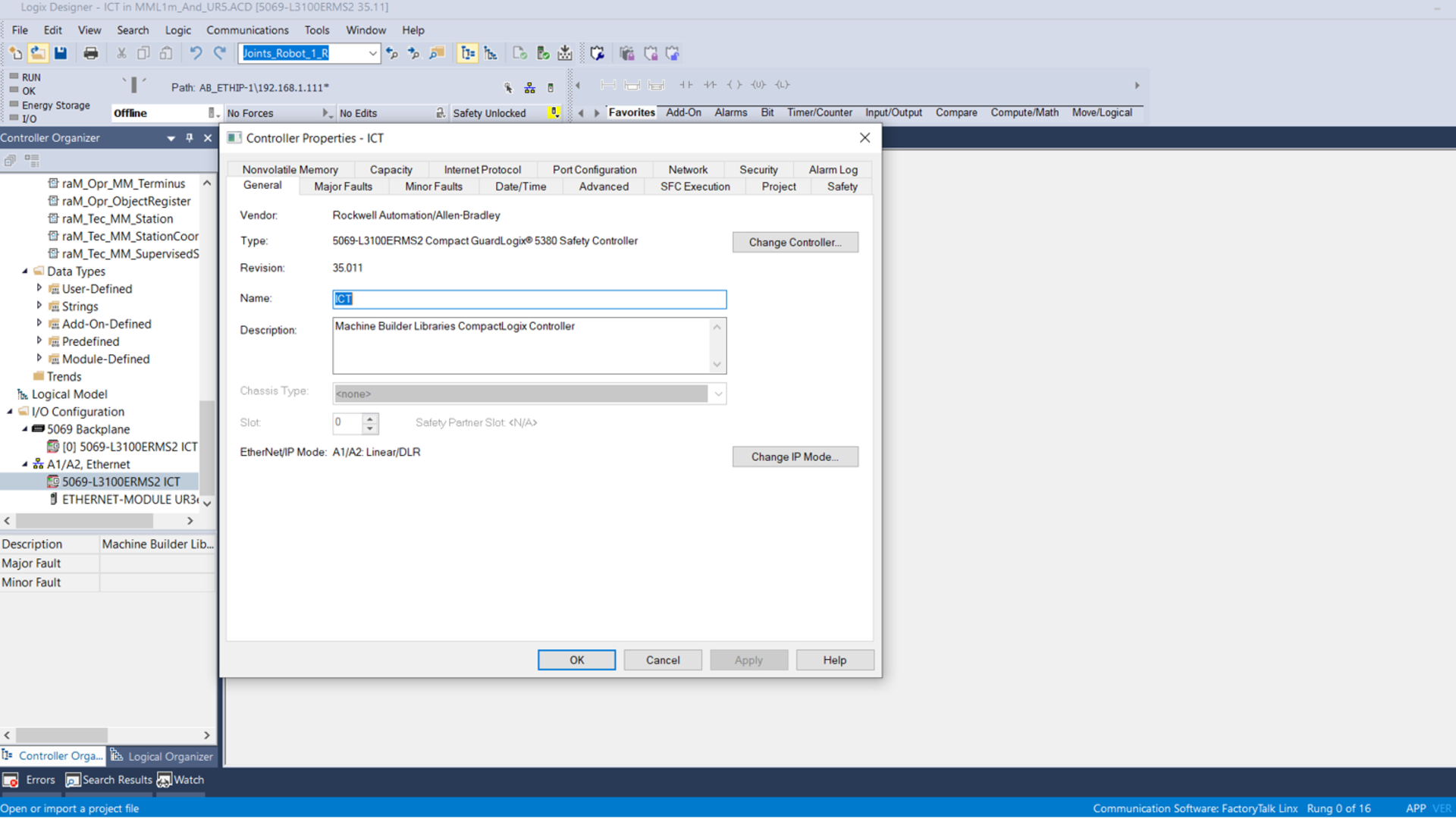
Reemplace los dispositivos físicos en la configuración de Studio 5000 y configure las direcciones IP asignadas dejando los mismos nombres de los dispositivos.
Paso 4
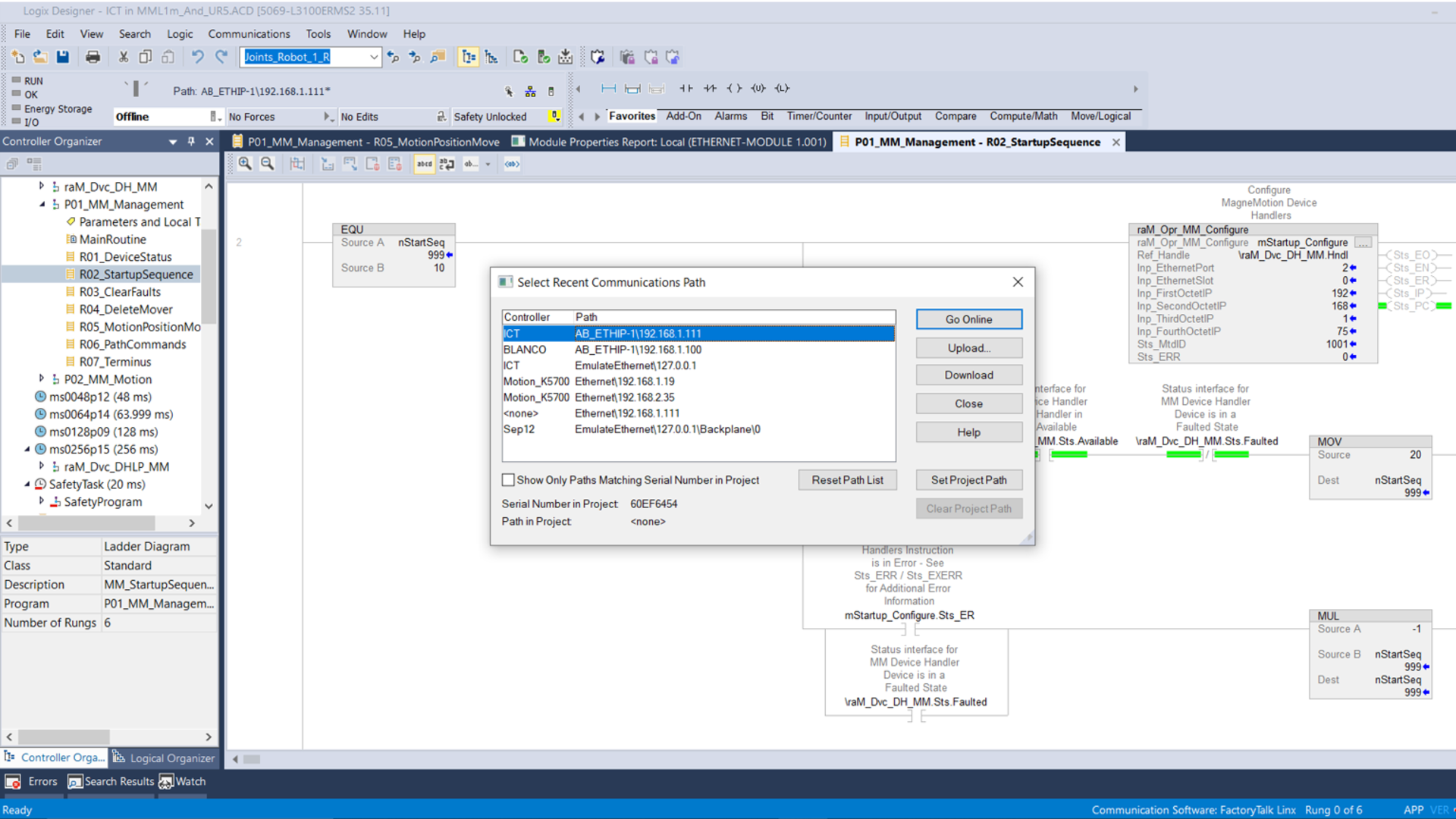
Reemplace el controlador en la configuración de Studio 5000 para la descarga del programa.
Paso 5
Valide la conexión de cada parte del Sistema a través de pings en Command Prompt. Seguido de ello, cambie la dirección IP de los componentes en Emulate3D.
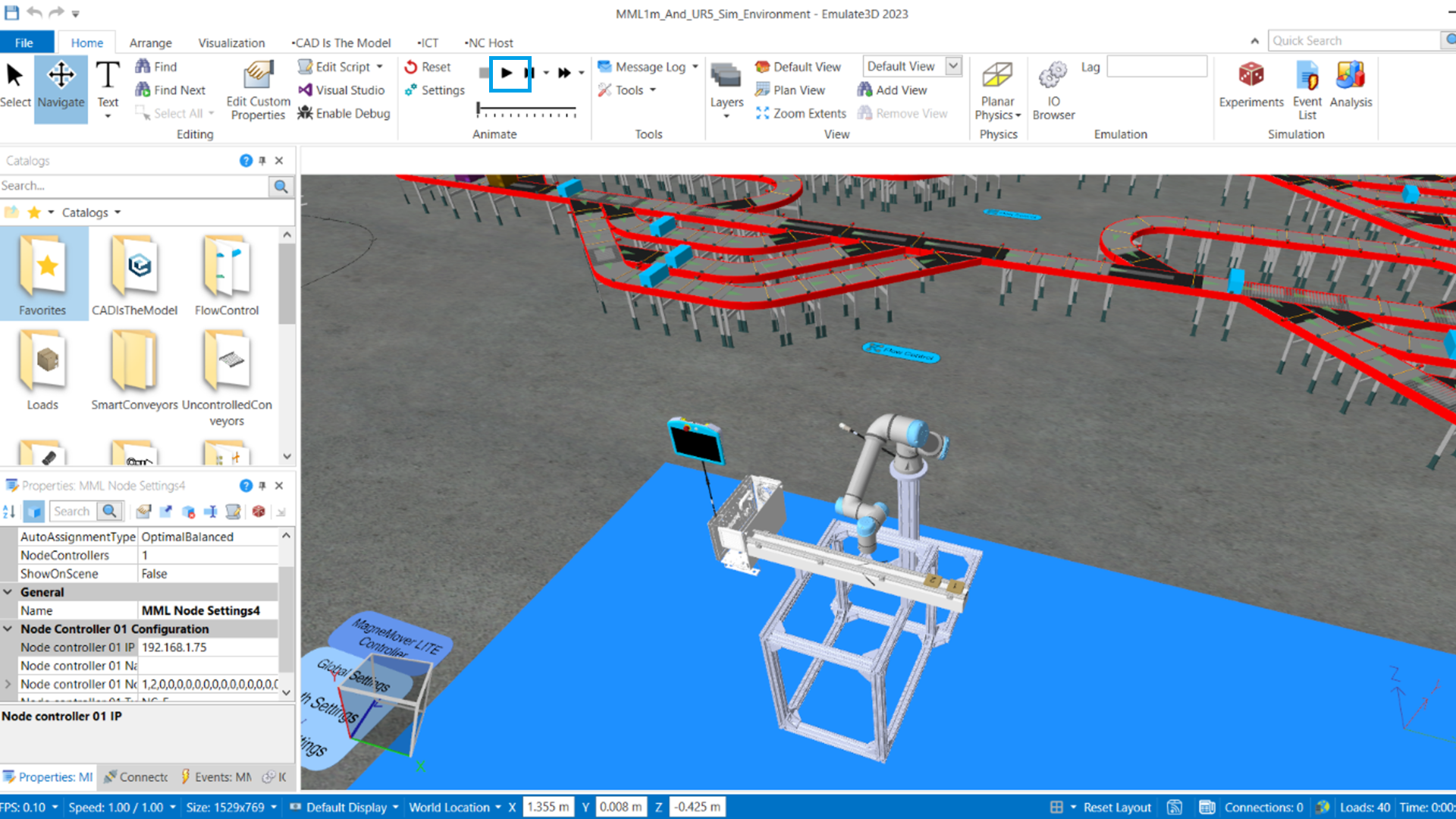
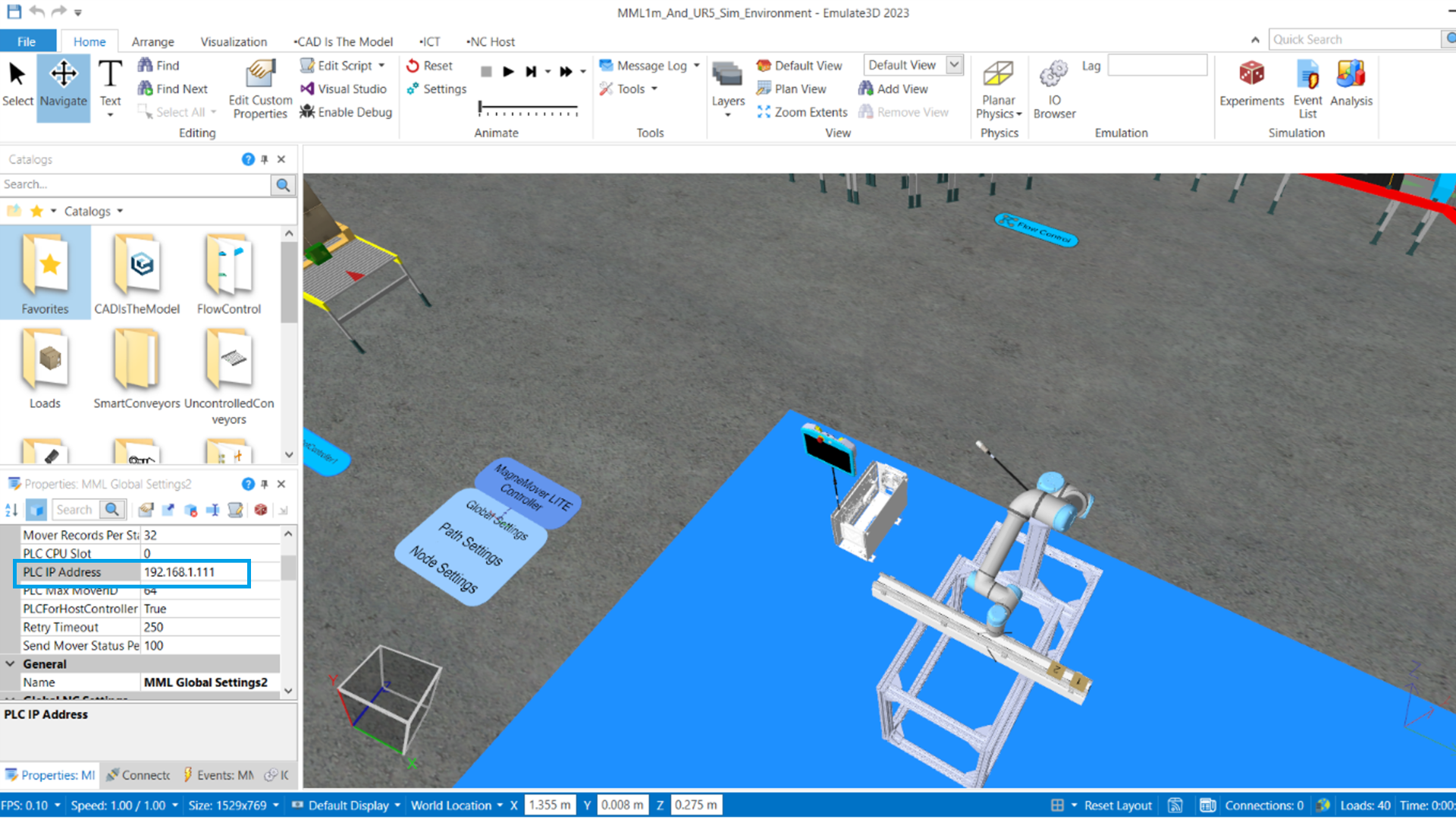
5.1. Haga click en Global Settings del controlador MML y cambie la dirección IP del PLC.
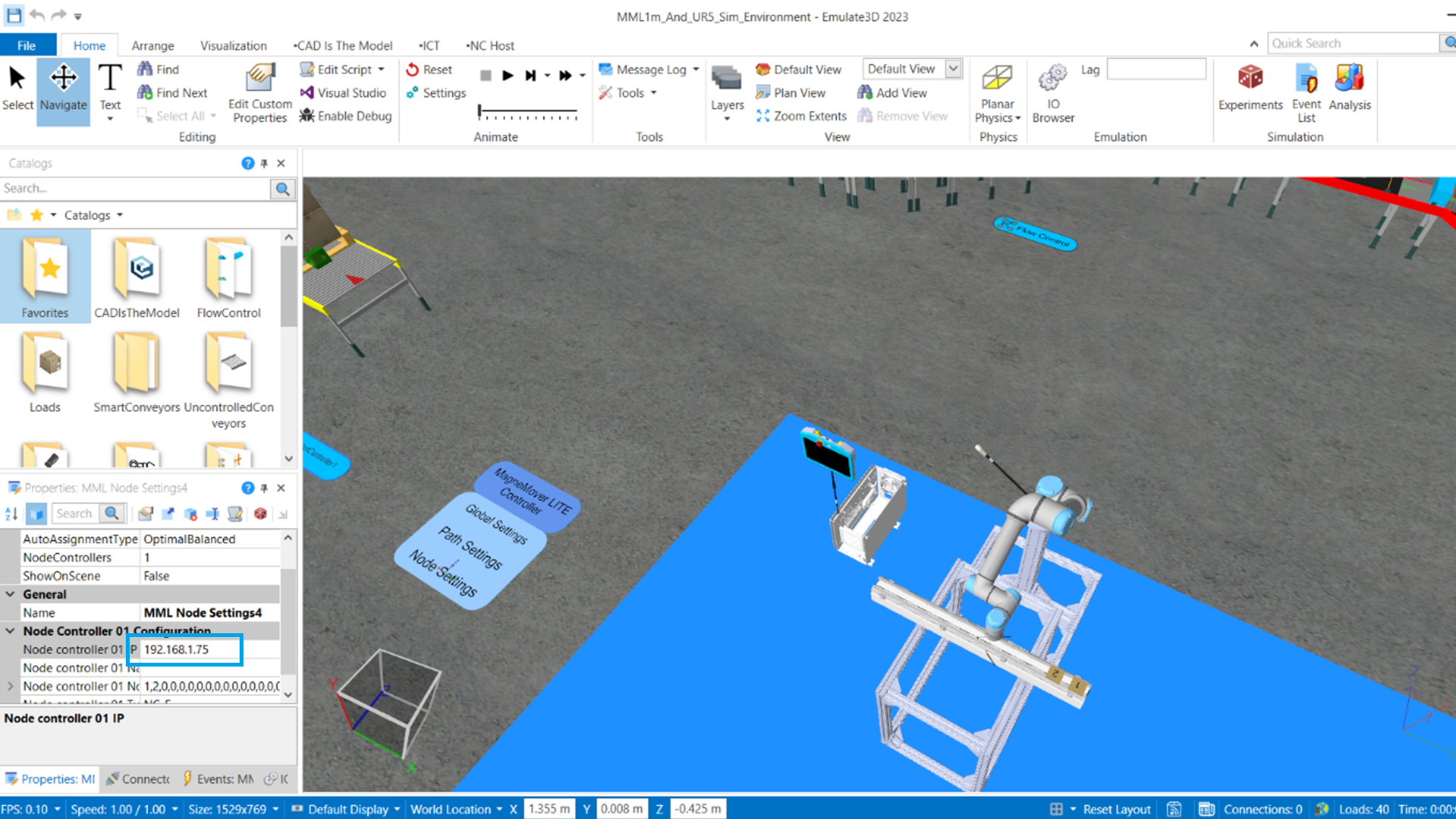
5.2. Haga click en Node Settings del controlador MML y cambie la dirección IP del controlador de nodos.
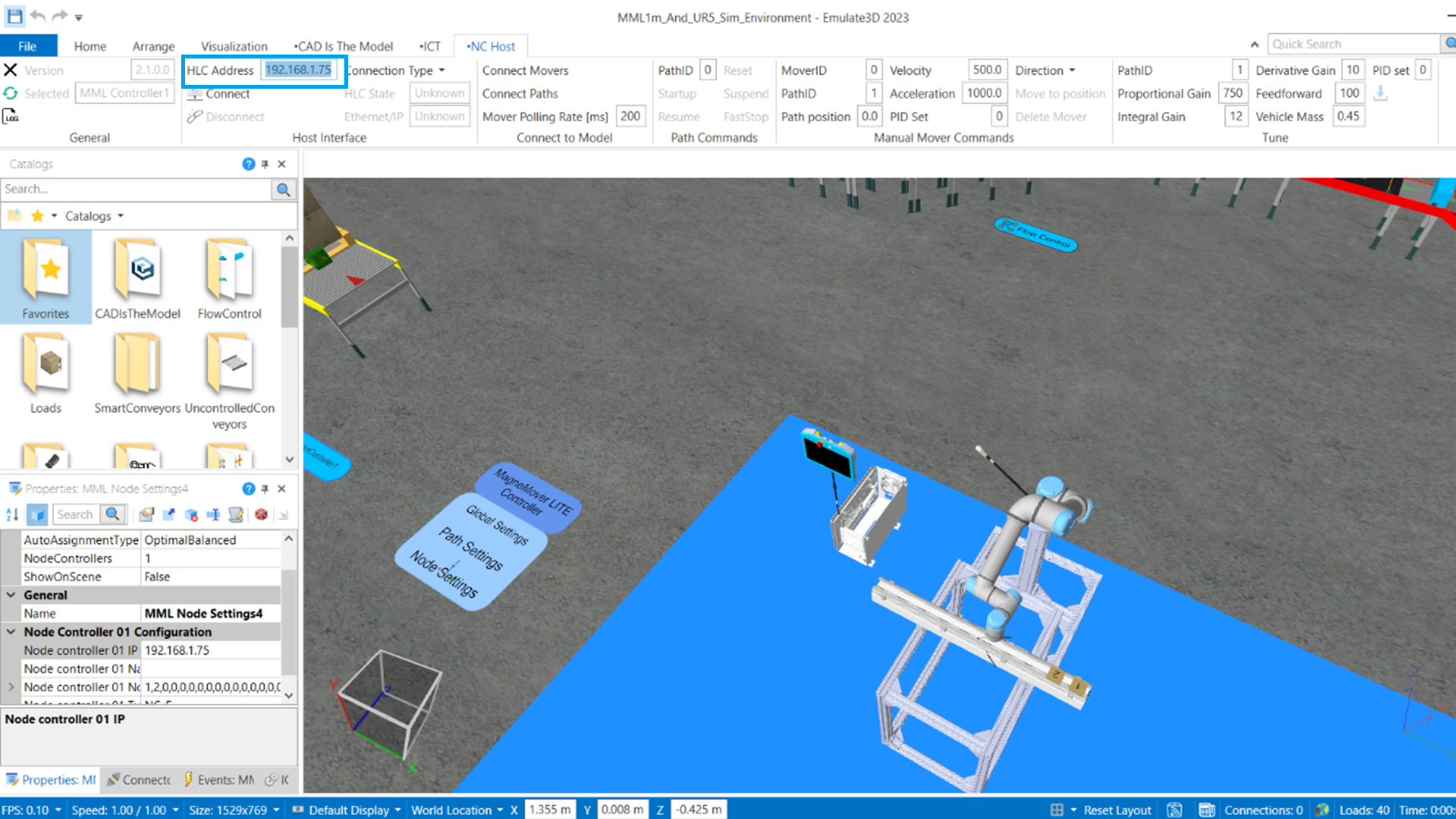
5.3. Cambie la dirección HLC en la pestaña NCHost a la dirección IP del controlador de nodos.
Paso 6
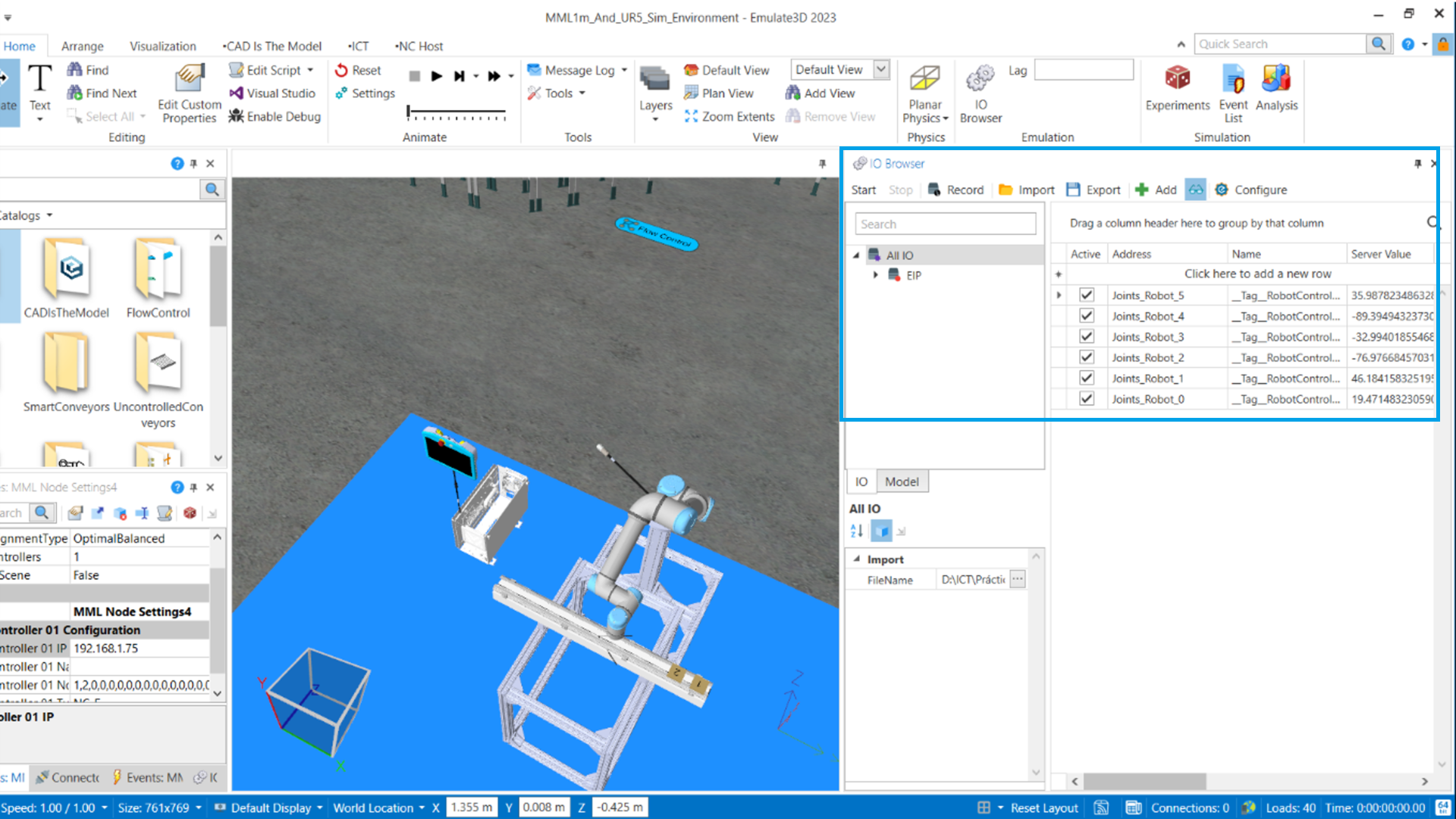
Haga click en IO Browser e importe la configuración de tags del archivo Excel compartido.
Paso 7
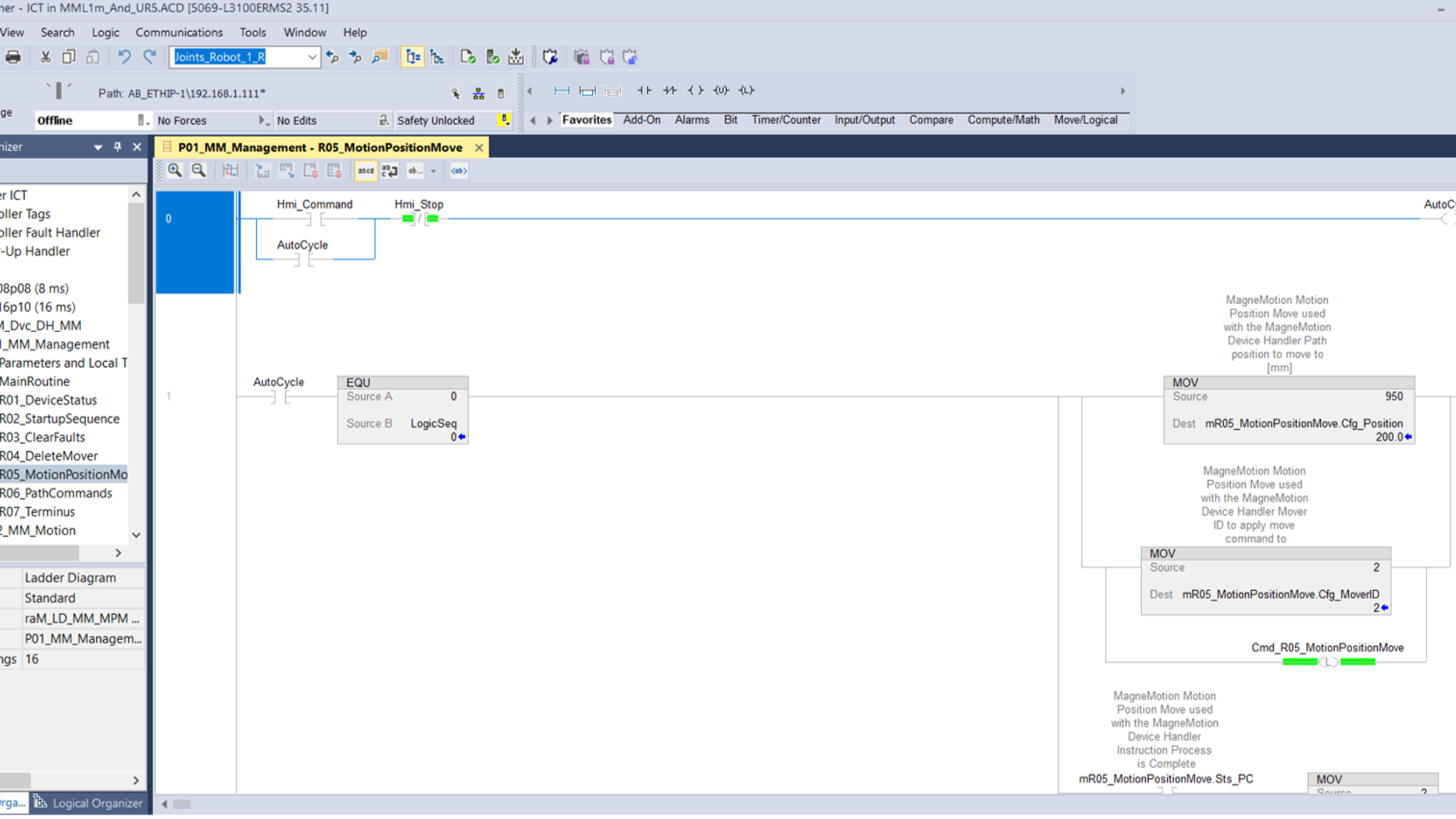
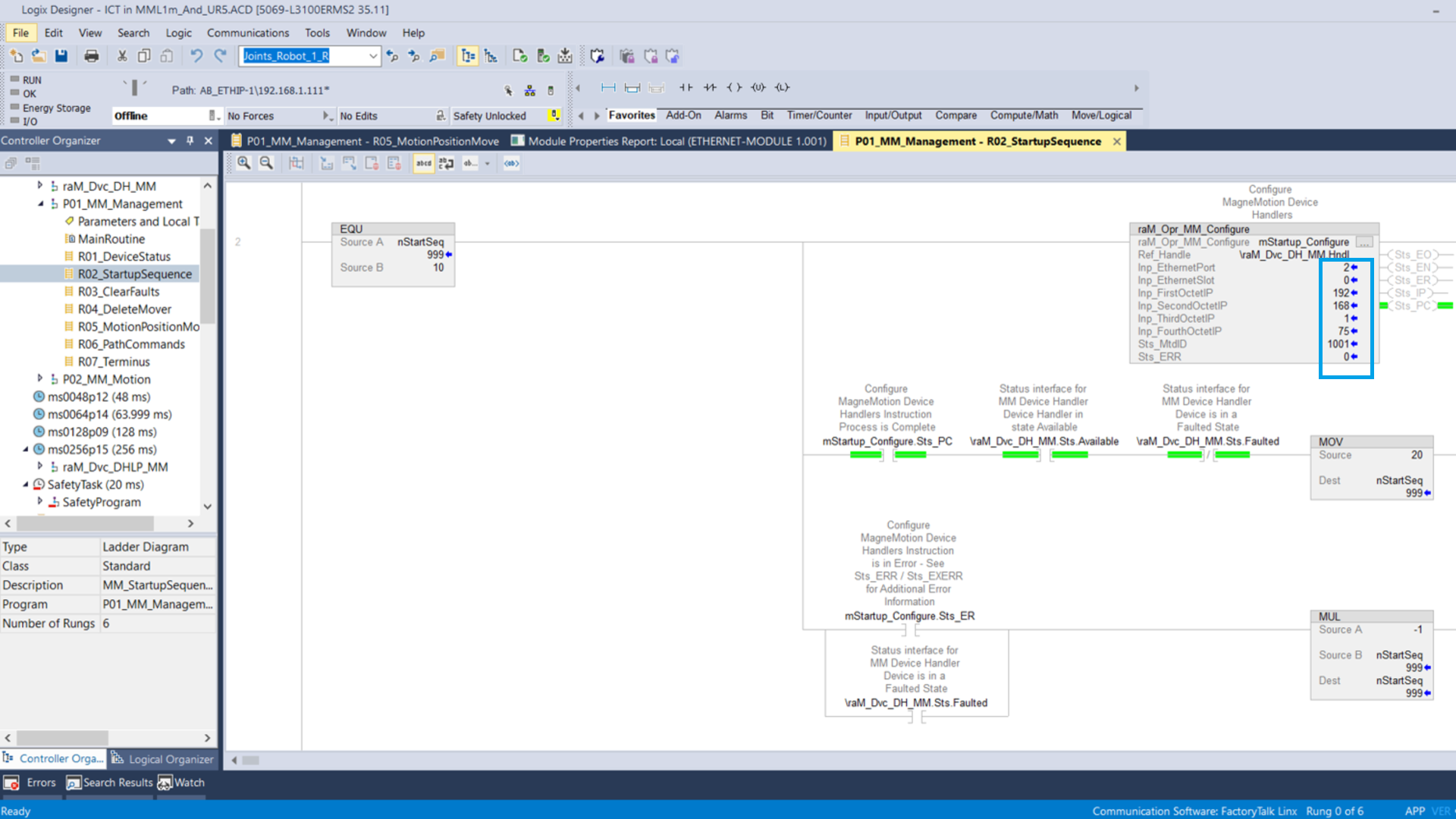
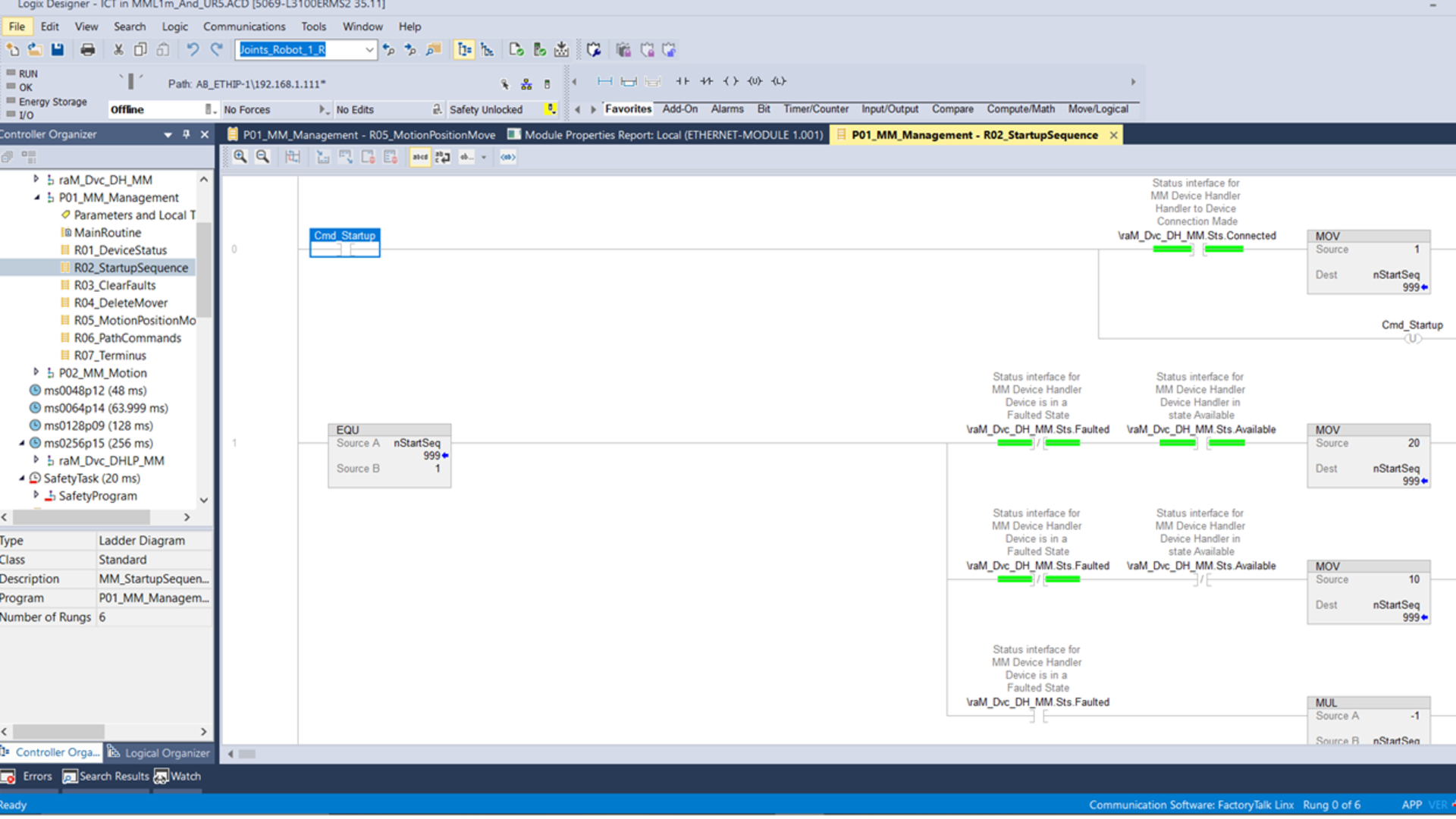
Abra al proyecto anexado de Studio 5000 y ubique el programa “R02_StartupSequence” con ruta: ms0016p10: P01_MM_Management.
Cambie la dirección IP del controlador de nodos en la línea 2.
Paso 8
Descargue el Proyecto de Studio 5000 al controlador PLC y seleccione Run Mode.
Paso 9
En el mismo programa, aplique un Toggle Bit a Cmd_Startup para inicializar el motor MML y espere a que el valor de nStartSeq sea 999 para validar el proceso de inicialización.
Paso 10
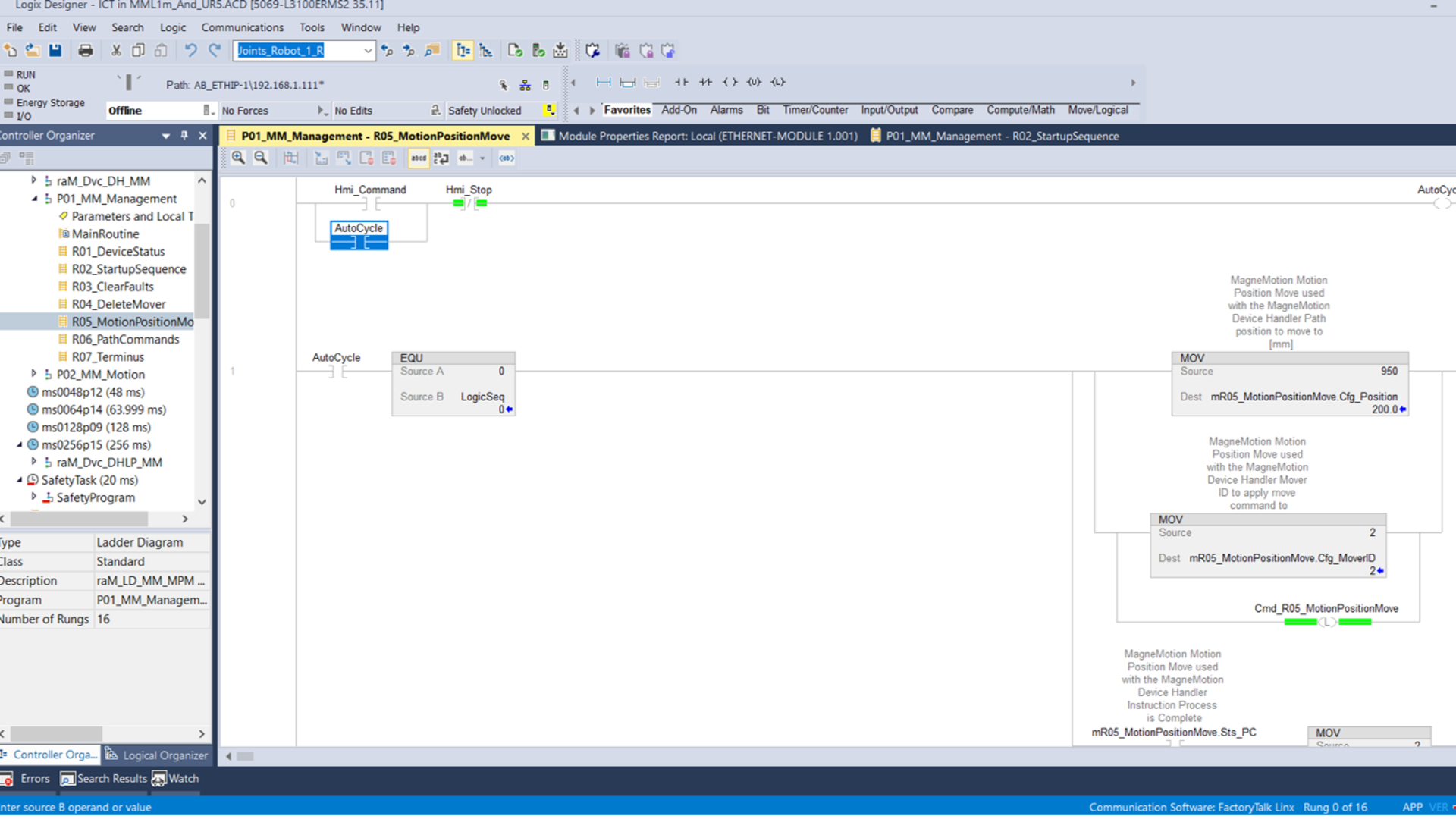
Entre al programa “R05_MotionPositionMove Program” en la misma ruta y aplique un Toggle Bit a “AutoCycle”. Esto empezará el programa de movimiento del sistema MML. En este programa se encuentra la secuencia de movimiento vehicular que puede ser editada.
Paso 11
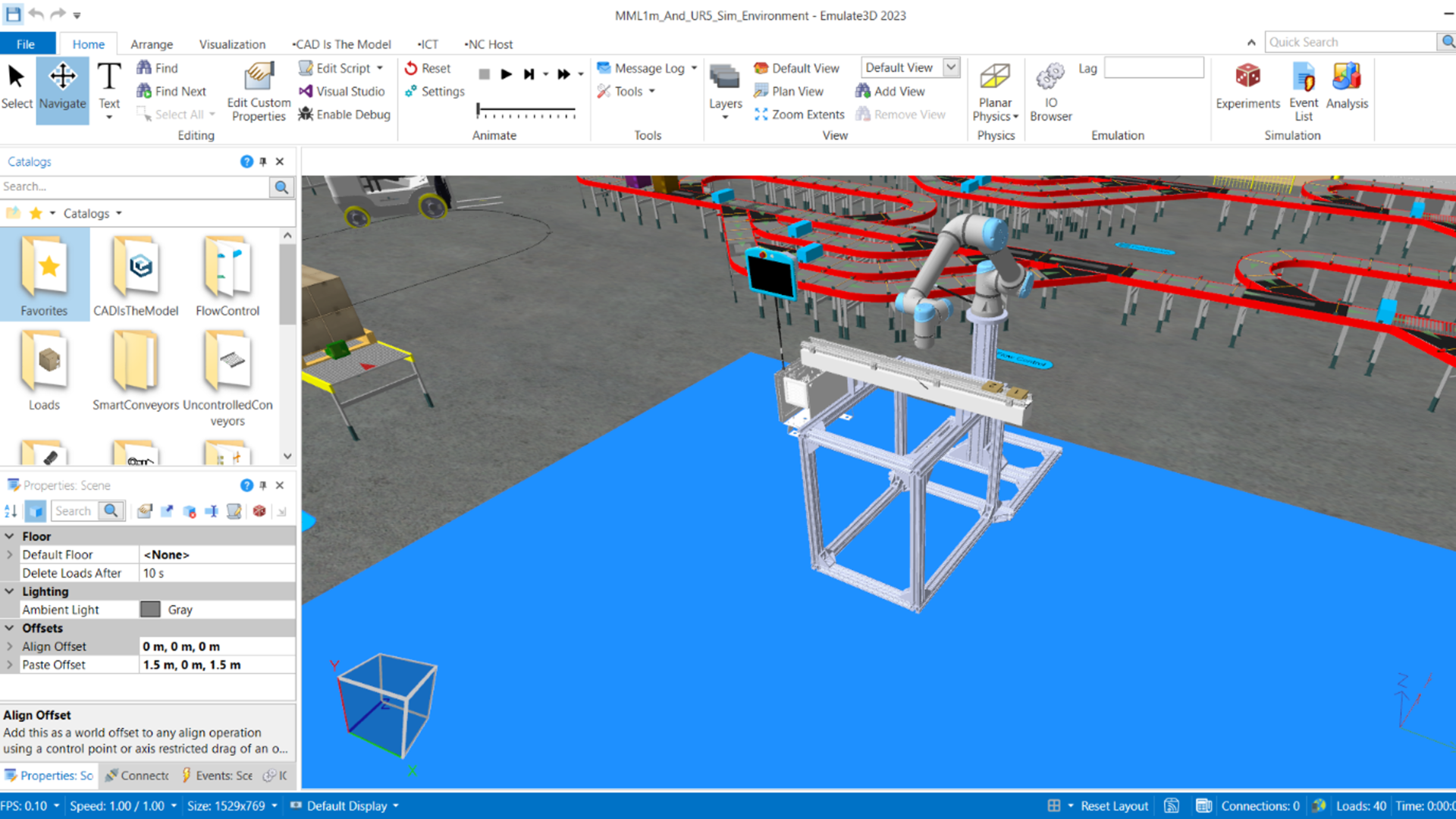
11.1. Entre al modelo de Emulate3D y corrobore que en la pestaña NC Host el tipo de conexión sea Status.
11.2. Seleccione Connect debajo del apartado HLC Address.
11. 3. Seleccione el controlador MML y en la pestaña NC Host seleccione Connect Movers y Connect Paths.
11.4. Cambie el Mover Polling Rate para movimientos más suaves disminuyendo su valor.

Paso 12
12.1. En la pestaña de Home Tab seleccione el ícono de play.
12.2. Verifique que los componentes se muevan correctamente. Si el cobot se encuentra en una posición estática diferente, repita el Paso 7 y verifique la conexión del PLC en IO Browser al modelo digital.