모든 것이 순조롭게 진행되고 있는 것처럼 보였지만, 프로그램 디버깅과 위치 교육이 오랫동안 골치 아픈 과제로 남아 있었습니다. 프로그램 자체는 장비가 구축되기 전에도 검사할 수 있지만, 디버깅은 장비가 구축되고 프로그램을 실행한 후에만 수행할 수 있었고, 그 다음에서야 비로소 교육이 가능했습니다.
일반적으로 로봇의 각 축 위치를 입력하는 휴먼 머신 인터페이스(HMI)를 통해 교육이 수행되었습니다. 정밀한 위치 입력을 위해서는 많은 주의와 시간이 필요했습니다. “시스템이 구축될 때까지 기다리지 않고 디버깅 프로세스를 시작할 수 있다면 어떨까”라는 생각을 하게 된 것은 당연한 일이었습니다.
이외에도 시운전이 또 다른 도전과제였습니다. 특히 해외 프로젝트의 경우, 현장 사람들은 장비가 도착하기 전까지 목적지에 따라 몇 주 또는 몇 개월을 기다려야 했습니다. 배송 및 운송 시간 동안 어떤 일을 할 수 있는지 생각을 하다가 로크웰 오토메이션의 Emulate3D™ 소프트웨어에 대해 알게 되었습니다. 히라타와 로크웰 오토메이션은 특히 미국으로 선적되는 장비의 PLC와 서보 제품 같은 부품의 공급을 위해 비즈니스 관계를 맺고 있었습니다.
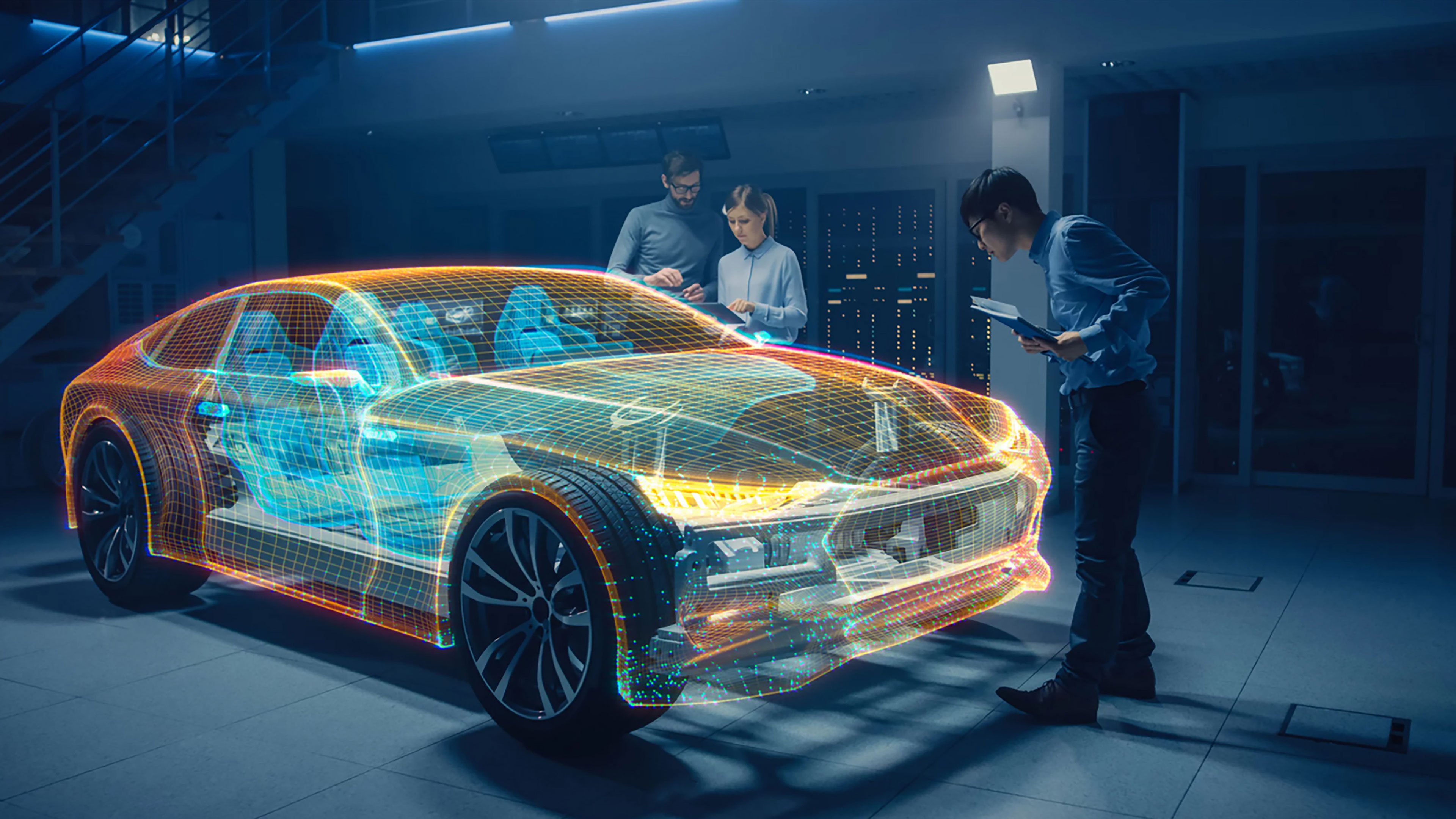
2019년 1월 로크웰 오토메이션은 디지털 엔지니어링 기능의 확장을 위해 Emulate3D를 인수하고 디지털 툴의 판매를 위한 프로모션을 시작했습니다. 당시 시뮬레이션 소프트웨어를 통한 오프라인 교육이 대중화되었지만, 시뮬레이션으로는 프로그램을 테스트할 수 없었기 때문에 시뮬레이션 툴로 디버깅을 수행할 수 없었습니다. 에뮬레이션을 사용하면 엔지니어가 3D CAD(Computer-Aided Design) 오브젝트를 사용하여 가상 환경에서 프로그램을 실행할 수 있으므로, 장비가 구축될 때까지 기다리지 않고 프로그램을 디버깅할 수 있습니다. 히라타는 일본 로크웰 오토메이션의 기술 컨설턴트가 수행한 첫 번째 데모를 보고 깊은 인상을 받았습니다.