- Studio 5000 Logix Designer
- Tasks, programs, and routines
- Add-On Instructions
- Controller Organizer
- Logical Organizer
- Alarms
- Tag-based alarms
- Tag Editor and Data Monitor
- Configure settings for Tag Editor and Data Monitor
- Equipment phases
- Equipment Sequences
- Equipment Sequence Diagrams
- Ladder Editor
- Structured Text Editor
- Sequential Function Chart Editor
- Define the steps of an SFC process
- PlantPAx instruction properties
- Controller Properties
- Editing Controller Properties
- Controller Security
- Source Protection
- License Source Protection for Routines and Add-On Instructions
- Module Information
- 1756 ControlLogix I/O Modules
- Instruction Set
Motion Homing Config Attributes
Use the Homing functionality to establish a machine reference position, or Home Position for the associated axis. Homing configuration attributes require associated position feedback devices. Homing cannot be used with drives configured for Encoderless or Sensorless operation.
This tables describe the motion homing configuration attributes for a Motion Control Axis.
Home Mode
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E | Set/SSV | USINT | 1 | - | - | Enumeration 0 = Passive 1 = Active (PVTC) 2-55 = Reserved |
The Home Mode attribute determines if:
- Homing actively moves the axis to generate the homing event
- An external agent generates a homing event by moving the axis
The Motion Axis supports active and passive Homing modes. Active homing is the most common homing procedure for physical servo axes but does not apply when Axis Configuration is Feedback Only since it requires active control of the axis. The
Home Sequence
attribute describes the available homing sequences for both active and passive Homing modes. Homing Mode | Description |
|---|---|
Active | When active homing is chosen as the homing mode, the desired homing sequence is then selected by specifying whether or not a home limit switch, a specified torque level, and/or the encoder marker is used for this axis. Active homing sequences always use the trapezoidal velocity profile with dynamics defined by Home Speed, Home Return Speed, Home Acceleration, and Home Deceleration. |
Passive | Passive homing redefines the current absolute position of the axis on the occurrence of a home switch, encoder marker, or home to torque event. Passive homing is most commonly used to calibrate uncontrolled axes, although it can also be used with controlled axes to create a custom homing sequence. Passive homing, for a given home sequence, works similar to the corresponding active homing sequence, except that no motion is commanded-the controller just waits for the switch, marker, or torque events to occur. |
Home Direction
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E PV Only | Set/SSV | USINT | 1 | - | - | Enumeration 0 = Unidirectional forward 1 = Bidirectional forward 2 = Unidirectional reverse 3 = Bidirectional reverse 4-255 = Reserved |
The Home Direction attribute is the starting direction of a Homing Sequence when configured for active Home Mode.
This attribute is only valid for position and velocity control.
Home Sequence
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E | Set/SSV | USINT | 0 | - | - | Enumeration 0 = Immediate (default) 1 = Home to switch (O) 2 = Home to marker (O) 3 = Home to switch then marker (O) 4 = Home to torque (O) 5 = Home to torque then marker (O) 6 = Immediate Absolute (O) 7-255 = Reserved |
Determines the motion sequencing used to trigger the desired homing events. Filtering of optional enumerations based on available hardware support and feedback interface hardware. If the feedback type configured for an axis does not support a marker signal, these homing sequences cannot be used:
- 2 = Home to marker (O)
- 3 = Home to switch then marker (O)
- 5 = Home to torque then marker (O)
Filtering of optional enumerations may be required based on available hardware support and feedback interface hardware.
Home Sequence Descriptions
Homing Sequence Types | Description |
|---|---|
Active Homing | Active homing sequences employ trapezoidal jog velocity profiles to move the axis while waiting for a homing event to occur. Tip: Immediate home sequence types do not employ trapezodial jog velocity profiles.When selecting Active Home Mode, the Home Sequence attribute uses a home limit switch, a home torque level, or the feedback device marker for the homing events. The Home Direction attribute determines the directional behavior of jog profiles with the homing sequence. Uni-directional and Bi-directional determine if the jog is to reverse direction after detecting the homing event. Forward and Reverse refer to the direction of the initial jog during the homing process. |
Active Immediate Homing | This is the simplest active homing sequence type. The axis actual position and command positions are updated based on the configured Home Position. |
Active Immediate Absolute Homing | During this sequence, the controller enables the drive and redefines the actual position and command position to the current position of the absolute feedback device. The Home Offset attribute is applicable. If non-zero, the Home Offset applies to current command and actual position: Current Position = Absolute Feedback Position - Home Offset. |
Active Bidirectional Home to Switch | This active homing sequence is useful when an encoder marker is not available. When this sequence is performed, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until the home limit switch is detected. The axis then decelerates to a stop at the specified Home Deceleration and then moves in the opposite direction at the specified Home Return Speed and Home Acceleration until the home limit switch is cleared. When the home limit switch is cleared, axis position is immediately redefined to be equal to the Home Position and the axis decelerates to a stop at the specified Home Direction. If Home Offset is non-zero, then the Home Position will be offset from the point where the home switch is cleared by this value. Once the axis decelerates to a stop at the specified Home Deceleration, the controller then moves the axis back to the Home Position at the Home Return Speed and Home Acceleration using a trapezoidal move profile. If the axis is configured in Cyclic Travel Mode, the move back to the Home Position takes the shortest path, for example, no more than ½ revolution. The axis behavior for this active homing sequence is depicted in the following diagram: 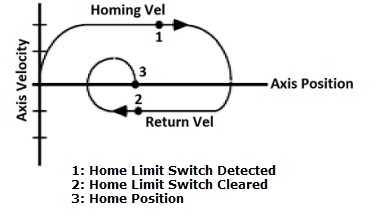 If the controller detects that the state of the home switch at the start of the homing sequence is active, the controller immediately reverses the homing direction and begins the return leg of the homing sequence. Neglecting the mechanical uncertainty of the home limit switch, the accuracy of this homing sequence depends on the time uncertainty in detecting the home limit switch transitions. The position uncertainty of the home position is the product of the maximum time for the control to detect the home limit switch (~10 milliseconds) and the specified Home Return Speed. For this reason, the Home Return Speed is often made significantly slower than the Home Speed. For example, if a Home Return Speed of 0.1 inches per second (6 IPM) is specified, the uncertainty of the home position is calculated as shown below: Uncertainty = 0.1 Inch/Sec * 0.01 Sec = 0.001 Inch. |
Active Bidirectional Home to Marker | This active homing sequence is useful for single turn rotary and linear encoder applications since these have only one encoder marker for full axis travel. When this sequence is performed, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until the marker is detected. The Home Position is then assigned to the axis position corresponding to the marker location, and the axis decelerates to a stop at the specified Home Deceleration. If Home Offset is non-zero, then the Home Position will be offset from the point where the marker is detected by this value. The controller then moves the axis back to the Home Position at the specified Home Return Speed and Home Acceleration using a trapezoidal move profile. If the axis is configured as a Cyclic Travel Mode, the move back to the Home Position takes the shortest path (for example, no more than ½ revolution). The axis behavior for this homing sequence is depicted in the following diagram: 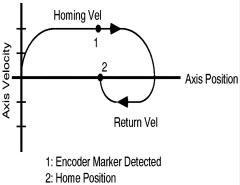 The accuracy of this homing sequence depends only on the time delay in detecting the marker transition. The position uncertainty of the home position is the product of the maximum delay for the control to detect the marker pulse (~1 microsecond) and the specified Home Speed. For example, if a Home Speed of 1 inches per second (60 IPM) is specified, the uncertainty of the home position is calculated as shown below: Uncertainty = 1 Inch/Sec * 0.000001 Sec = 0.000001 Inch. |
Active Bidirectional Home to Switch then Marker | This is the most precise active homing sequence available. When this sequence is performed, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until the home limit switch is detected. The axis then decelerates to a stop at the specified Home Deceleration and moves in the opposite direction at the specified Home Return Speed and Home Acceleration until the home limit switch is cleared. After clearing the home limit switch, the axis continues in the same direction at the Home Return Speed until the first encoder marker is detected. The Home Position is assigned to the axis position at the moment that the marker is detected, and the axis then decelerates to a stop at the specified Home Deceleration. If Home Offset is non-zero, then the Home Position will be offset from the point where the marker is detected by this value. The controller then moves the axis back to the Home Position at the specified Home Return Speed and Home Acceleration using a trapezoidal move profile. If the axis is configured in Cyclic Travel Mode, the move back to the Home Position takes the shortest path (for example, no more than ½ revolution). Axis behavior for this active homing sequence is depicted in the following diagram: 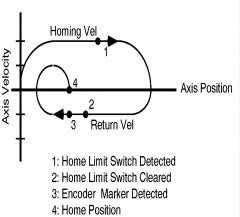 If the controller detects that the state of the home switch at the start of the homing sequence is active, the controller immediately reverses the homing direction and begins the return leg of the homing sequence. |
Active Unidirectional Home to Switch | Unidirectional home is usually used when the physical axis cannot change directions. This active homing sequence is useful when an encoder marker is not available and either unidirectional motion is required or proximity switch is being used. When this sequence is performed in the Active Homing Mode, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until the home switch is detected. If the Home Offset is zero, the Home Position is assigned to the axis position at the moment that the limit switch is detected and the axis decelerates to a stop at the specified Home Deceleration. If Home Offset is non-zero, then the Home Position will be offset from the point where the switch is detected by this value. The controller then continues to move the axis to the Home Position at the specified Home Speed and Home Acceleration using a trapezoidal move profile. By setting a Home Offset greater than the deceleration distance, unidirectional motion to the Home Position is insured. However, if the Home Offset value is less than the deceleration distance, then the axis is simply decelerated to a stop at the specified Home Deceleration. The axis does not reverse direction to move to the Home Position. In this case, the PC-bit leg of the associated MAH instruction is not set when the IP-bit leg is cleared.In the case where this homing sequence is performed on a cyclic axis and the Home Offset value is less than the deceleration distance when the home event is detected, the control automatically adds one or more revolutions to the move distance. This guarantees the resulting move to the Home Position is unidirectional. |
Active Unidirectional Home to Marker | This active homing sequence is useful for single turn rotary and linear encoder applications when unidirectional motion is required. When this sequence is performed in the Active Homing Mode, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until the marker is detected. If the Home Offset is zero, the Home Position is assigned to the axis position at the moment that the marker is detected and the axis decelerates to a stop at the specified Home Deceleration. If Home Offset is non-zero, then the Home Position will be offset from the point where the marker was detected by this value. The controller then continues to move the axis to the Home Position at the specified Home Speed and Home Acceleration using a trapezoidal move profile. The axis position is updated based on the Home Position and Home Offset. Even if the Home Offset is zero, the position is updated. Zero is a valid number. By setting a Home Offset greater than the deceleration distance, unidirectional motion to the Home Position is insured. However, if the Home Offset value is less than the deceleration distance, then the axis is simply decelerated to a stop at the specified Home Deceleration. The axis does not reverse direction to move to the Home Position. In this case, the PC-bit leg of the associated MAH instruction is not set when the IP-bit leg is cleared.In the case where this homing sequence is performed on a cyclic axis and the Home Offset value is less than the deceleration distance when the home event is detected, the control automatically adds one or more revolutions to the move distance. This guarantees the resulting move to the Home Position is unidirectional. |
Active Unidirectional Home to Switch then Marker | This active homing sequence is useful for multi-turn rotary applications when unidirectional motion is required. When this sequence is performed in the Active Homing Mode, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until the home switch is detected. The axis continues in the same direction at the Home Speed until the first marker event is detected. If the Home Offset is zero, the Home Position is assigned to the axis position at the precise position where the marker was detected, and the axis decelerates to a stop at the specified Home Deceleration. The axis position is updated based on the Home Position and Home Offset. If Home Offset is non-zero, then the Home Position will be offset from the point where the marker was detected by this value. The controller then continues to move the axis to the Home Position at the specified Home Speed and Home Acceleration using a trapezoidal move profile. By setting a Home Offset greater than the deceleration distance, unidirectional motion to the Home Position is insured. However, if the Home Offset value is less than the deceleration distance, then the axis is simply decelerated to a stop at the specified Home Deceleration. The axis does not reverse direction to move to the Home Position. In this case, the PC-bit leg of the associated MAH instruction is not set when the IP-bit leg is cleared.In the case where this homing sequence is performed on a cyclic axis and the Home Offset value is less than the deceleration distance when the home event is detected, the control automatically adds one or more revolutions to the move distance. This guarantees the resulting move to the Home Position is unidirectional. If the controller detects that the state of the home switch at the start of the homing sequence is active, the controller immediately establishes the Home Position based on the current axis position, and if allowed by the unidirectional motion constraint, begins to move to the Home Position. |
Active Home to Torque then Marker | Like the Home to Torque sequence, the Home to Torque then Marker sequence is applicable when a hard stop is used as the home position, as is common for a linear actuator, and the feedback device is equipped with an encoder marker signal. The occurrence of the hard stop is detected when the commanded torque applied to the motor reaches or exceeds the user specified torque level. Since the Home to Torque sequence relies on the mechanical end of travel for operation, Uni-directional homing will not be possible so only Forward Bi-directional and Reverse Bi-directional are allowed. A delay filter is implemented in the drive to reduce any false/nuisance triggers when there is a spike in the torque feedback upon enabling or jogging the motor under load. By including the encoder marker in the homing sequence this is the most precise homing operation available for torque level based homing. When this sequence is performed, the axis moves in the specified Home Direction at the specified Home Speed and Home Acceleration until a hard stop is detected, such as when the Home Torque Threshold is exceeded for a period equal to Home Torque Time. The axis then reverses direction, first decelerating at the Home Deceleration rate, then moving away from the hard stop using the Home Acceleration to reach the Home Return Speed, until the first encoder marker is detected. Once the marker has been detected, the Home Position is calculated. The axis then decelerates to a stop at the specified Home Deceleration and the controller restores overridden drive attributes to their saved original values. If the calculated Home Position is not beyond the hard stop, the axis moves to the Home Position at the Home Return Speed and Home Acceleration and Home Deceleration using a trapezoidal move profile. Axis behavior for this homing sequence is depicted in the following diagram: 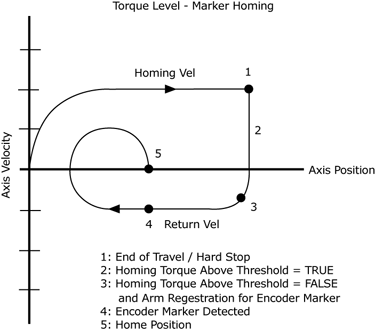 |
Passive Immediate Home | This is the simplest passive homing sequence type. When this sequence is performed, the controller immediately assigns the Home Position to the current axis actual position. This homing sequence produces no axis motion. |
Passive Immediate Absolute Homing | During this sequence, the drive redefines the actual position and command position to the current position of the absolute feedback device. If non-zero the Home Offset applies to the current command and actual position: Current Position = Absolute Feedback Position - Home Offset. Tip: The Servo On does not execute during the Passive Immediate Absolute sequence. |
Passive Home with Switch | This passive homing sequence is useful when an encoder marker is not available or a proximity switch is being used. When this sequence is performed in the Passive Homing Mode, an external agent moves the axis until the home switch is detected. The Home Position is assigned to the axis position at the moment that the limit switch is detected. If Home Offset is non-zero, then the Home Position will be offset from the point where the switch is detected by this value. |
Passive Home with Marker | This passive homing sequence is useful for single turn rotary and linear encoder applications. When this sequence is performed in the Passive Homing Mode, an external agent moves the axis until the marker is detected. The home position is assigned to the axis position at the precise position where the marker was detected. If Home Offset is non-zero, then the Home Position will be offset from the point where the switch is detected by this value. |
Passive Home with Switch then Marker | This passive homing sequence is useful for multi-turn rotary applications. When this sequence is performed in the Passive Homing Mode, an external agent moves the axis until the home switch and then the first encoder marker is detected. The home position is assigned to the axis position at the precise position where the marker was detected. If Home Offset is non-zero, then the Home Position will be offset from the point where the switch is detected by this value. |
Home Configuration Bits
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E | Set/SSV | DWORD | 0x00 | - | - | Bitmap 0 = Reserved 1 = Home Switch Normally Closed 2-31 = Reserved |
The Home Configuration Bits attribute determines homing related behavior such as the sense of the home switch contacts.
The Home Switch Normally Closed bit attribute determines the normal state of the home limit switch used by the homing sequence. The normal state of the switch is its state prior to being engaged by the axis during the homing sequence. For example, if the Home Switch Normally Closed bit is set (true) then the condition of the switch prior to homing is closed. When the switch is engaged by the axis during the homing sequence, the switch is opened, which constitutes a homing event.
Home Position
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E | Set/SSV | REAL | 0 | -maxpos | maxpos | Position Units |
If Travel Mode is Cyclic: 0 <= home pos < unwind
The Home Position is the desired absolute position for the axis after the specified homing sequence has been completed. After an active homing sequence has completed, the axis is left at the specified Home Position.
- If bidirectional homing, then the axis is left at the Home Position.
- If unidirectional homing and TravelMode=Cyclic, then the axis is left at the Home Position
Otherwise, the axis is not at the home position and the axis position is based on the Home Position.
In most cases, Home Position is set to zero, although any value, within the Maximum Positive and Negative Travel limits of the axis (if enabled), may also be used. (A description of the Maximum Positive and Negative Travel configuration attributes may be found in the Servo and Drive Axis Object specifications.) For a cyclic axis, the Home Position is constrained to be a positive number less than the Position Unwind value divided by the Conversion Constant.
Home Offset
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E | Set/SSV | REAL | 0 | -maxpos | maxpos | Position Units |
When applied to an active or passive Homing Mode, using a non-immediate Home Sequence, the Home Offset is the desired position offset of the axis Home Position from the position at which the home event occurred. The Home Offset is applied at the end of the specified homing sequence before the axis moves to the Home Position. In most cases, Home Offset is set to zero.
After an active bidirectional homing sequence has completed, the axis is left at the specified Home Position. If the Home Offset is non-zero, the axis will then be offset from the marker or home switch event point by the Home Offset value. If the Home Offset is zero, the axis will sit right on top of the marker or home switch point.
This is not valid for immediate Home Sequence.
Home Speed
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E PV Only | Set/SSV | REAL | 0 | 0 | maxspd | Position Units / Sec |
The Home Speed attribute controls the speed of the jog profile used in the first leg of an active homing sequence as described in the above discussion of the Home Sequence Type attribute.
This is not valid for immediate or immediate absolute Home Sequence.
Home Return Speed
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Required - E PV Only | Set/SSV | REAL | 0 | 0 | maxspd | Position Units / Sec |
The Home Return Speed attribute controls the speed of the jog profile used after the first leg of an active bidirectional homing sequence as described in the above discussion of the Home Sequence Type attribute.
This is not valid for immediate or immediate absolute Home Sequence.
Home Acceleration
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Optional - E PV Only | Set/SSV | REAL | 0 | 0 | maxacc | Position Units / Sec 2 |
The Home Acceleration attribute controls the acceleration of the velocity profile used in an active Home Sequence attribute.
This is not valid for immediate or immediate absolute Home Sequence.
Home Deceleration
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Optional - E PV Only | Set/ SSV | REAL | 0 | 0 | maxacc | Position Units / Sec 2 |
The Home Deceleration attribute controls the deceleration of the axis as it comes to a stop in an active homing sequence as described in the Home Sequence attribute.
This is not valid for immediate or immediate absolute Home Sequence.
Home Torque Limit
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Optional - E PV Only | Set/ SSV | REAL | 0 | 0 | 100 | Position Units / Sec 2 |
The Home Torque limit attribute is the value temporarily applied by the controller to Torque Limit Positive and Torque Limit Negative in the drive during an active Home to Torque sequence.
This is only valid for Home to Torque or Home to Torque then Marker Home Sequence.
Home Torque Threshold
Usage | Access | Data Type | Default | Min | Max | Semantics of Values |
|---|---|---|---|---|---|---|
Optional - E PV Only | Set/ SSV | REAL | 0 | 0 | 100 | Position Units / Sec 2 |
The Home Torque Threshold attribute sets the minimum torque level needed to detect the hard stop during a Home to Torque sequence. The drive’s output torque must exceed the specified Home Torque Threshold for the specified Home Torque Time. The units for Home Torque Threshold are expressed as a percentage of the operative Torque Limit, which during the homing sequence is set to the Home Torque Limit by the controller.
This is only valid for Home to Torque or Home to Torque then Marker Home Sequence.
Provide Feedback