- Studio 5000 Logix Designer
- Tasks, programs, and routines
- Add-On Instructions
- Controller Organizer
- Logical Organizer
- Alarms
- Tag-based alarms
- Tag Editor and Data Monitor
- Configure settings for Tag Editor and Data Monitor
- Equipment phases
- Equipment Sequences
- Equipment Sequence Diagrams
- Ladder Editor
- Structured Text Editor
- Sequential Function Chart Editor
- Define the steps of an SFC process
- PlantPAx instruction properties
- Controller Properties
- Editing Controller Properties
- Controller Security
- Source Protection
- License Source Protection for Routines and Add-On Instructions
- Module Information
- 1756 ControlLogix I/O Modules
- Instruction Set
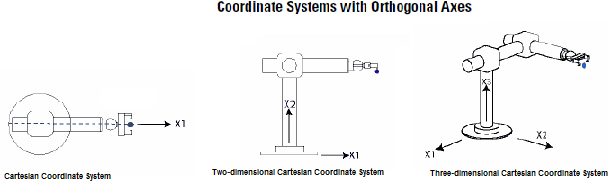
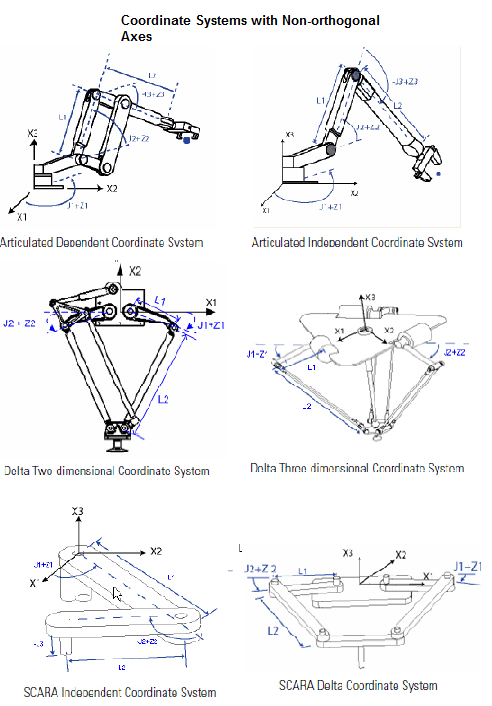
Multi-Axis Coordinated Motion Instructions
Use the Multi-Axis Coordinated Motion Instructions to move up to six axes in a coordinate system.
Available Instructions
Ladder Diagram and Structured Text
Function Block
Not available
Coordinate system examples are:
 |
 |
 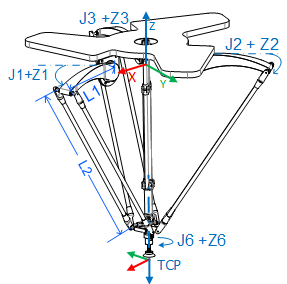 Delta J1J2J6 Coordinate System Delta J1J2J3J6 Coordinate System 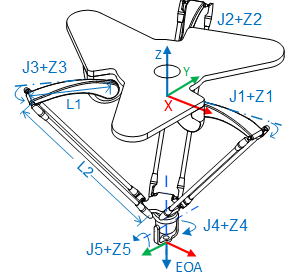 Delta J1J2J3J4J5 Coordinate System |
The multi-axis coordinated motion instructions are:
If: | Use this instruction: |
|---|---|
Stopping the axes of a Coordinate System or cancel a transform. | MCS |
Initiating a single or multi-dimensional linear Coordinated move for the specified axes within a Cartesian Coordinate System. | MCLM |
Initiating a two- or three-dimensional circular Coordinated move for the specified axes within a Cartesian Coordinate System. | MCCM |
Initiating a change in path dynamics for Coordinate motion active on the specified Coordinate System. | MCCD |
Initiating a controlled shutdown of all of the axes of the specified Coordinate System. | MCSD |
Initiating a reset of all of the axes of the specified Coordinate System from the shutdown state to the axis ready state and clear the axis faults. | MCSR |
Starting a transform that links two Coordinate Systems together. This instruction is only available on supported controllers. | MCT |
Calculating the position of one Coordinate System with respect to another Coordinate System. This instruction is only available on supported controllers. | MCTP |
Defining a Master and Slave relationship between a Master Axis and a Coordinate System. Coordinate motion instructions MCLM and MCCM executed on a Slave Coordinate System will be synchronized to a Master Axis. | MDCC |
Calculating the position of a point in one coordinate system to the equivalent point in a second coordinate system. | MCTPO |
Starting a multi-dimensional coordinated path move for the specified axes within a Cartesian coordinate system. | MCPM |
Starting a transform that links two coordinate systems together with orientation control. | MCTO |
Using Different Termination Types When Blending Instructions
To blend two MCLM or MCCM instructions, start the first one and queue the second one. The tag for the coordinate system gives you two bits for queuing instructions.
- MovePendingStatus
- MovePendingQueueFullStatus
For example, this ladder diagram uses Coordinate System cs1 to blend Move1 into Move2.
Example Ladder Diagram for Blended Instructions
If Step=1 then
Move1 starts and moves the axes to a position of 5, 0
And once Move1 is in process
And there is room to queue another move
Step=2

If Step=2 then
Move1 is already happening.
Move2 goes into the queue and waits for Move1 to complete.
When Move1 is complete, Move2 moves the axes to a position of 10, 5.
And once Move2 is in process and there is room in the queue,
Step=3.

When an instruction completes, it is removed from the queue and there is space for another instruction to enter the queue. Both bits always have the same value because you can queue only one pending instruction at a time. If the application requires several instructions to be executed in sequence, then the bits are set using these parameters.
Bit Parameters
When | Then |
|---|---|
One instruction is active and a second instruction is pending in the queue. |
|
An active instruction completes and leaves the queue. |
|
The termination type operand for the MCLM or MCCM instruction specifies how the currently executing move gets terminated. The following illustrations show the states of instruction bits and Coordinate System bits that get affected at various transition points (TP).
Bit States at Transition Points of Blended Move Using Actual Tolerance or No Settle

The following table shows the bit status at the various transition points shown in the preceding graph with termination type of either Actual Tolerance or No Settle.
Bit | TP1 | TP2 | TP3 |
|---|---|---|---|
Move1.DN | T | T | T |
Move1.IP | T | F | F |
Move1.AC | T | F | F |
Move1.PC | F | T | T |
Move2.DN | T | T | T |
Move2.IP | T | T | F |
Move2.AC | F | T | F |
Move2.PC | F | F | T |
cs1.MoveTransitionStatus | F | F | F |
cs1.MovePendingStatus | T | F | F |
cs1.MovePendingQueueFullStatus | T | F | F |
Bit States at Transition Points of Blended Move Using No Decel

The following table shows the bit status at the various transition points shown in the preceding graph with termination type of No Decel. For No Decel termination type distance-to-go for transition point TP2 is equal to deceleration distance for the Move1 instruction. If Move 1 and Move 2 are collinear, then Move1.PC will be true at TP3 (the programmed end-point of first move).
Bit | TP1 | TP2 | TP3 | TP4 |
|---|---|---|---|---|
Move1.DN | T | T | T | T |
Move1.IP | T | F | F | F |
Move1.AC | T | F | F | F |
Move1.PC | F | T | T | T |
Move2.DN | T | T | T | T |
Move2.IP | T | T | T | F |
Move2.AC | F | T | T | F |
Move2.PC | F | F | F | T |
cs1.MoveTransitionStatus | F | T | F | F |
cs1.MovePendingStatus | T | F | F | F |
cs1.MovePendingQueueFullStatus | T | F | F | F |
Bit States at Transition Points of Blended Move Using Command Tolerance

The following table shows the bit status at the various transition points shown in the preceding graph with termination type of Command Tolerance. For Command Tolerance termination type distance-to-go for transition point TP2 is equal to Command Tolerance for the Coordinate System cs1.
Bit | TP1 | TP2 | TP3 | TP4 |
|---|---|---|---|---|
Move1.DN | T | T | T | T |
Move1.IP | T | F | F | F |
Move1.AC | T | F | F | F |
Move1.PC | F | T | T | T |
Move2.DN | T | T | T | T |
Move2.IP | T | T | T | F |
Move2.AC | F | T | T | F |
Move2.PC | F | F | F | T |
cs1.MoveTransitionStatus | F | T | F | F |
cs1.MovePendingStatus | T | F | F | F |
cs1.MovePendingQueueFullStatus | T | F | F | F |
Bit States at Transition Points of Blended Move Using Follow Contour Velocity Constrained or Unconstrained

The following table shows the bits status at the transition points.
Bit | TP1 | TP2 | TP3 |
|---|---|---|---|
Move1.DN | T | T | T |
Move1.IP | T | F | F |
Move1.AC | T | F | F |
Move1.PC | F | T | T |
Move2.DN | T | T | T |
Move2.IP | T | T | F |
Move2.AC | F | T | F |
Move2.PC | F | F | T |
cs1.MoveTransitionStatus | F | F | F |
cs1.MovePendingStatus | T | F | F |
cs1.MovePendingQueueFullStatus | T | F | F |
Provide Feedback