로봇 공학으로 보완된 더욱 효율적인 설계
DCC Automation은 기존 장비의 성능 문제를 신속하게 파악했습니다. 구형 제어 시스템이 문제의 원인 중 하나였지만, 장비의 기본 설계도 문제였습니다.
사울린은 "많은 솔루션의 경우 케이스 제함과 포장을 하나의 장비에 결합하지만, 일반적으로 고속 애플리케이션에서 다른 접근 방식을 취하고 있습니다. 우리는 두 기술을 분리하여 제품을 쌓을 수 있는 더 많은 공간을 만들어 냅니다.”라고 설명합니다.
이 경우, 케이스 이렉터를 공간의 다른 부분에 배치했습니다. 그 결과 필요한 포장 패턴에 따라 제품을 쌓은 후 효율적인 다중 스트림으로 나눌 수 있습니다.
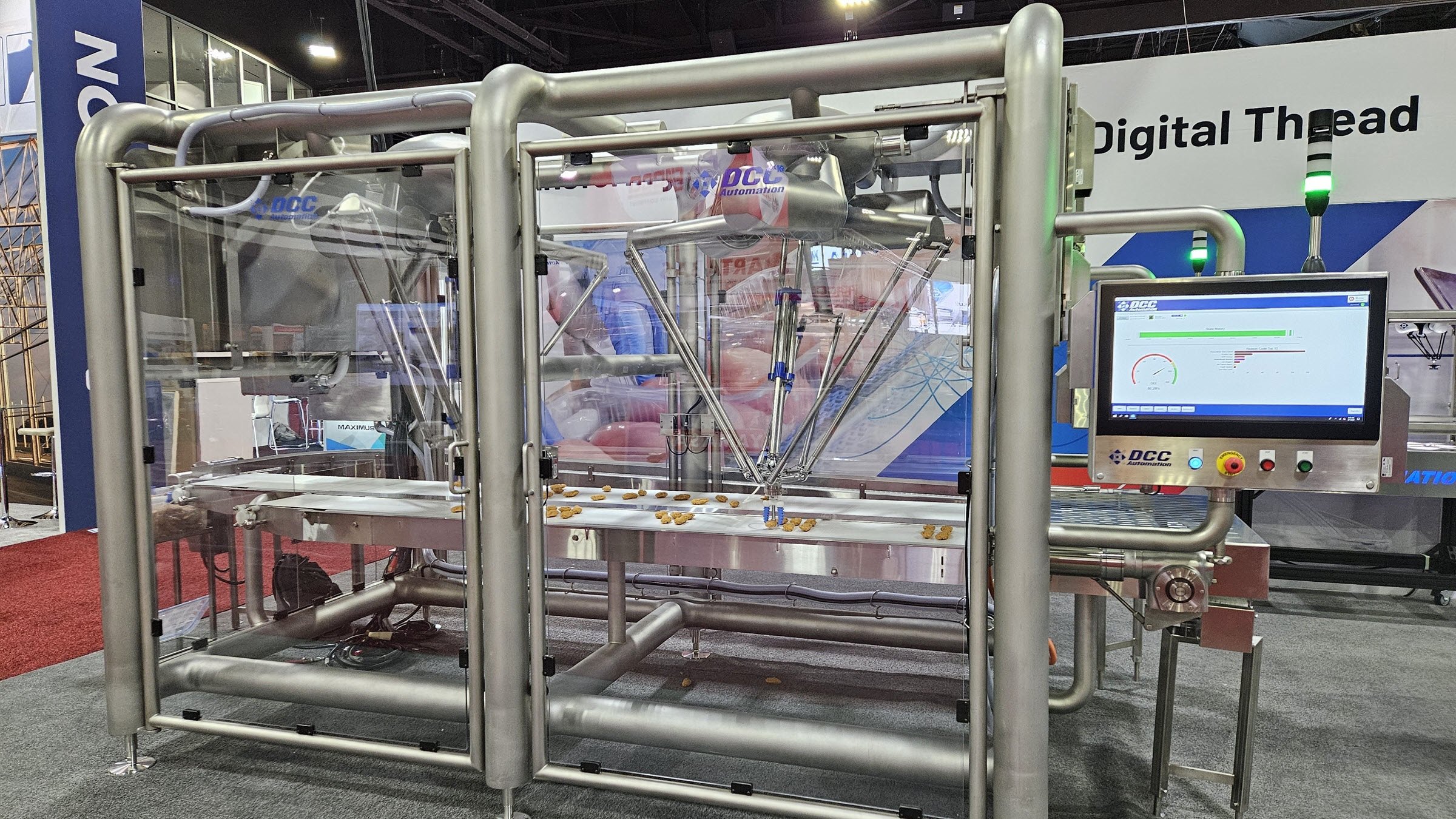
DCC Automation은 픽 앤 플레이스 공정을 위해 2차원 델타 로봇을 선택했습니다.
Saulean은 “On-Machine 로봇은 엄격한 기계적 솔루션보다 훨씬 더 많은 가능성을 제공합니다.”라고 말합니다. “이 시스템은 완전히 형성된 포장 패턴과 완전히 세워진 케이스를 제공합니다. 로봇은 완전한 포장 패턴을 픽 앤 플레이스합니다.”
포장된 케이스는 검사와 상부 밀봉을 거쳐 팔레타이저로 배출됩니다.
통합 제어의 장점
턴키 솔루션은 Allen-Bradley® Compact GuardLogix® 컨트롤러, Kinetix® 서보 드라이브 및 모터, FactoryTalk® View HMI 소프트웨어를 기반으로 하는 로크웰 오토메이션 플랫폼에서 실행됩니다. 이 시스템은 EtherNet/IP™ 네트워크에 통합되어 있습니다. 또한 DCC Automation은 설계 프로세스 초기에 Emulate3D ™ 소프트웨어를 사용하여 시스템 기능을 시뮬레이션하고 확인했습니다.
컨트롤러의 기능적 장점 덕분에 DCC Automation은 모든 장비 운영에 로크웰 오토메이션 플랫폼을 사용했습니다. 별도의 로봇 제어 플랫폼이 필요하지 않았습니다. 통합 장비 제어는 설계와 통합을 용이하게 하며, 하나의 시스템만 이해하고 지원해야 하는 사용자를 위해 장비 작동 및 유지보수를 간소화합니다.
“DCC Automation은 로크웰 오토메이션 제어 모델을 완전히 수용하여 표준 구성요소를 사용하고 안전 기능을 비롯한 GuardLogix 컨트롤러의 모든 작업을 수행할 수 있게 되었습니다. 이러한 접근 방식은 무한한 효율성을 제공합니다.”라고 사울린은 말합니다.